Quantum theory (QT) is based on vectors. In QT, the physical system (world) is represented as an infinite-dimensional Hilbert space. The space is ontologically prior to the stuff, i.e., matter and energy, or fields if you like, that exists in the space. Each state of the system is defined as a point in the Hilbert space. Thus, the space of QT, i.e., the Hilbert space itself, is definitely not emergent. In the theory I describe here, there is also something that exists prior to the stuff. But it is not a vector (tensor) space. It’s just a set, a collection of unordered elements. These elements are the simplest possible, just binary elements (bits) that can be active (“1”) or inactive (“0”). Instead of the states being defined as points in a space, they are defined as subsets, very sparse subsets, of the overall, or universal, set. More precisely, I will define the matter (fermionic) states of the physical system as these sparse subsets. Thus, I will call this universal set the fermionic field. My theory will be able to explain the existence of individual matter entities (fermions) moving and interacting in lawful ways but these entities and the space within which they apparently move/interact will be emergent, i.e., epiphenomenal. In fact, any one dimension of the emergent space will be explained as the combination of: a) a pattern of intersections that exists over the sets that define the fermionic states of the system; and b) the sequential patterns of activation of those intersections through time.
In addition to the fermionic field, my theory also has a complete recurrent matrix of binary-valued connections, or weights, from the set of bits comprising the fermionic field back to itself. It is this matrix that mediates all changes of state from one time step to the next, i.e., the system’s dynamics. In other words, it is the medium by which effects, or signals, propagate. Thus, I call it the bosonic field. Note that my theory’s mechanics, i.e., the operation (algorithm) that executes the dynamics, is simpler, more fundamental, than any particular force of the standard model (SM). My theory has the capacity to explain, i.e., mechanistically represent, any force, i.e. any lawful pattern of changes of state through time. In fact, any such force will also be emergent: as suggested above, the fermionic evidence of any instance of the application of any force will be physically reified as a temporal sequence of activations of intersections. And the actual physical reification of the force at any given moment is the set of signals traversing the matrix from the set of active fermionic bits at t (which arrive back at the matrix at t+1). Thus, in this theory, nothing actually moves. That is, neither the fermionic nor the bosonic bits move. They change state, i.e., activate or deactivate, but they don’t move. All apparent motion of higher-level, e.g., standard model (SM) level, fermions and bosons, is explained as these patterns of activation/deactivation. We’re all very familiar with this concept. When you watch TV and see all the things moving/interacting, none of the pixels are actually moving. They’re just changing state.
As will become apparent, in my theory, the underlying problem is: can we find a set of state-representing sets and a setting of the matrix’s weights that implement (simulate) any particular emergent world, i.e., any given emergent space, in general, having multiple dimensions, some of which are spatial and some not, and multiple fermionic entities? This can be viewed as a search problem through the combinatorially large space of possible sets of state-representing sets and weight sets. The way I’ll proceed in describing this theory is by construction. I’ll choose a particular set of state-representing sets. I’ll choose them so that they have a particular pattern of monotonically decreasing intersections. Thus, that pattern of intersections constitutes a representation of a similarity (inverse distance) relation over the states. I’ll then show that there is a setting of the weights of the matrix, which, together with an algorithm (operator) for changing/updating the state, constrains the states to activate in a certain order, namely an order that directly correlates with the intersection sizes. Thus, the operator enforces gradual change through time of the value of that similarity (inverse distance) measure, i.e., it enforces locality (local realism) in the emergent space.
The Set-Based Theory
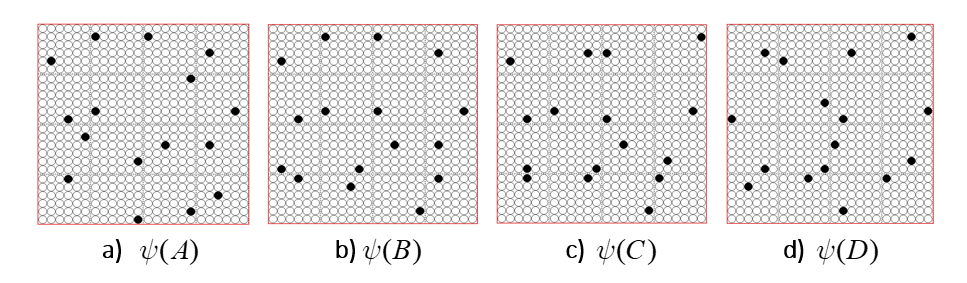
It is possible to represent the states of a physical system as sets, in particular, as sparse sets over binary units, where all states are of the same cardinality Q. Fig. 1 shows four states, A-D, represented by four such sets, ψ(A)-ψ(D). Here the representational field (the universal set), F, is organized as Q=16 winner-take-all (WTA) modules each with K=36 units. All state-representing sets consist of Q active units, one in each of the Q modules.
Fig. 1: The representational field, F, is the universal set of bits. F is partitioned into Q WTA modules, each comprised of K binary units. Every state of the represented physical system, S, is represented by a set of Q active units (black), one per module. We show the representations of four states, A-D, here.
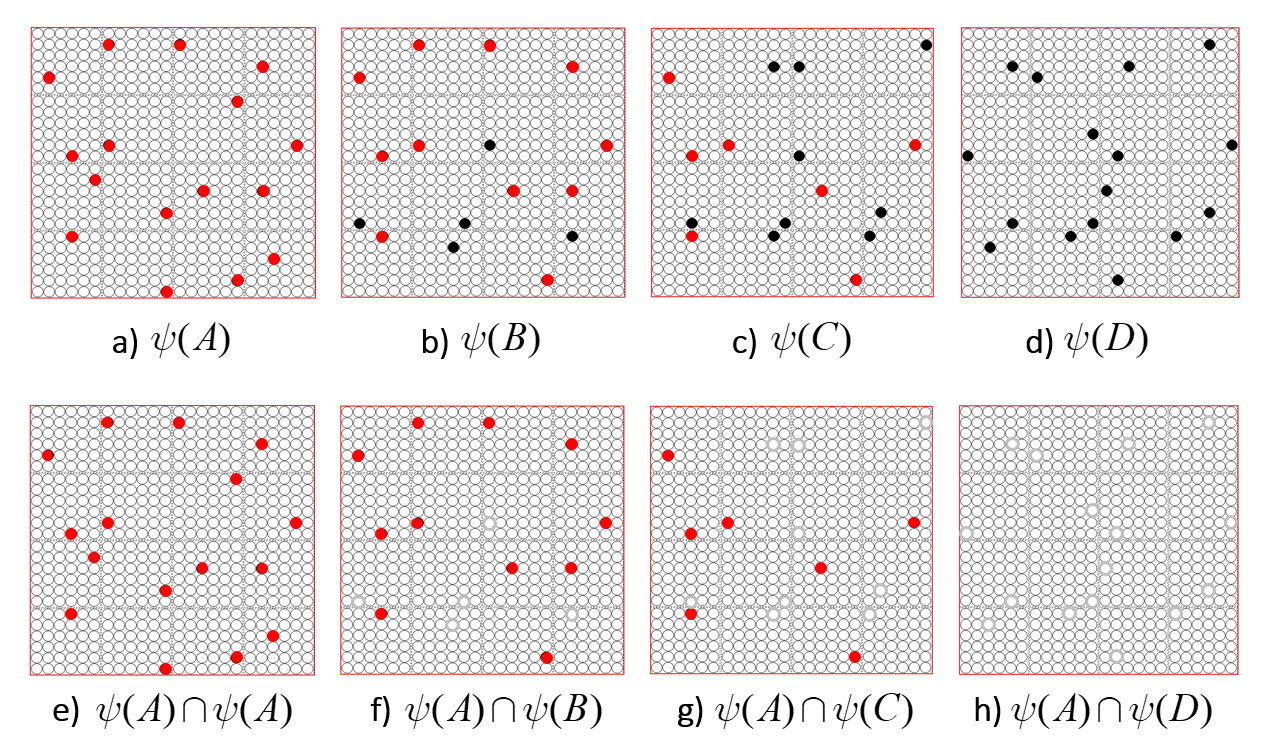
It is possible to represent the similarity of states by the size of their intersection. I’ve chosen these four sets to have a particular pattern of intersections, as shown in Fig. 2: specifically, the sets representing states B, C, and D, have progressively smaller intersections (red units) with the set representing A. Thus, this similarity measure, which we could call “similarity to A”, is physically reified as this pattern of intersections.
Fig. 2: (top row) Repeats Fig. 1 but with intersections with ψ(A) highlighted in red. (bottom row) Just showing the intersecting units.
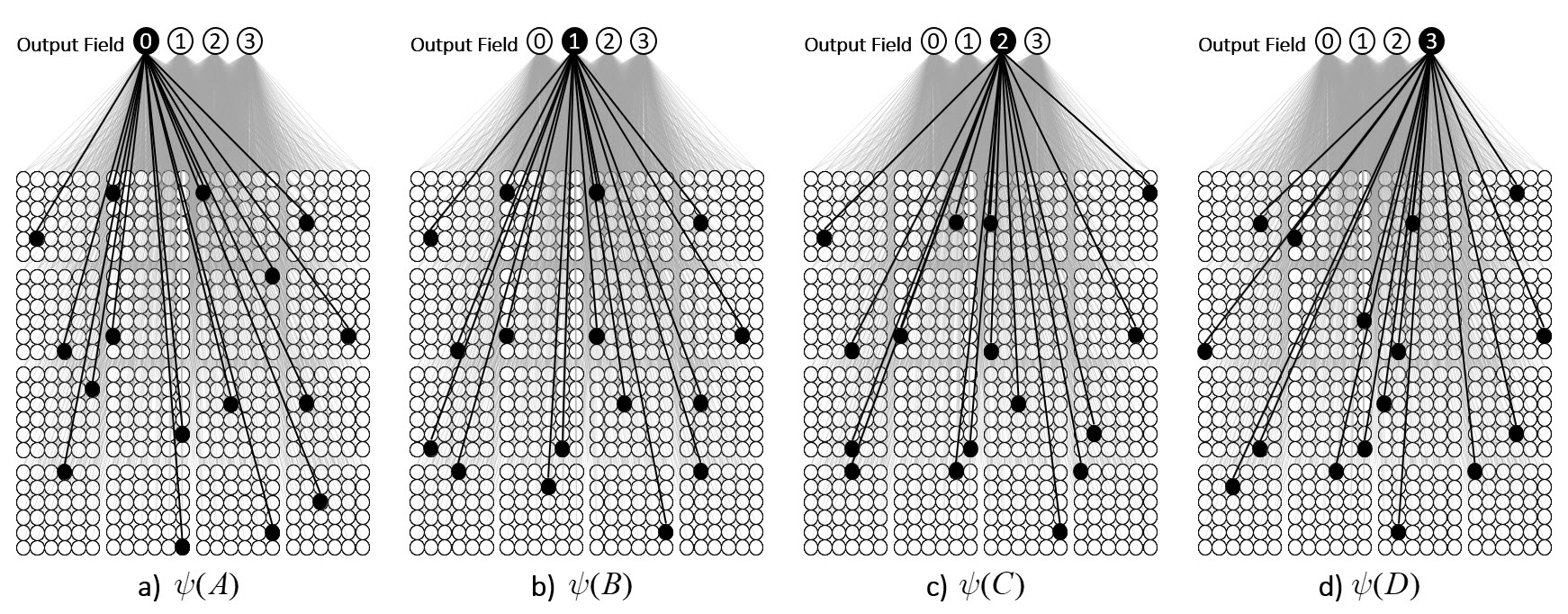
We can imagine a method for reading out the value of this similarity measure. Specifically, we could have another field of binary units, a simpler field, with just four units, labelled, “0”-“3”, that receives a complete binary matrix from F. Suppose we activate state A, i.e., turn on its Q units, i.e., the set ψ(A), and at the same time, turn on the output unit “0”, and increase the Q weights from the Q active units to output unit “0”, as in Fig. 3a. Suppose that at some other time, we activate B, i.e., ψ(B), simultaneously turn on output unit “1”. and increase the Q weights from ψ(B) to “1”, as in Fig. 3b. We do this for states C and D as well, increasing the Q weights from ψ(C) to “2”, and the Q weights from ψ(D) to “3”, as in Figs. 3c,d.
Fig. 3: Increasing the weights from the active set in the state-representing field, F, to the relevant output unit for each of the four defined states, A-D.
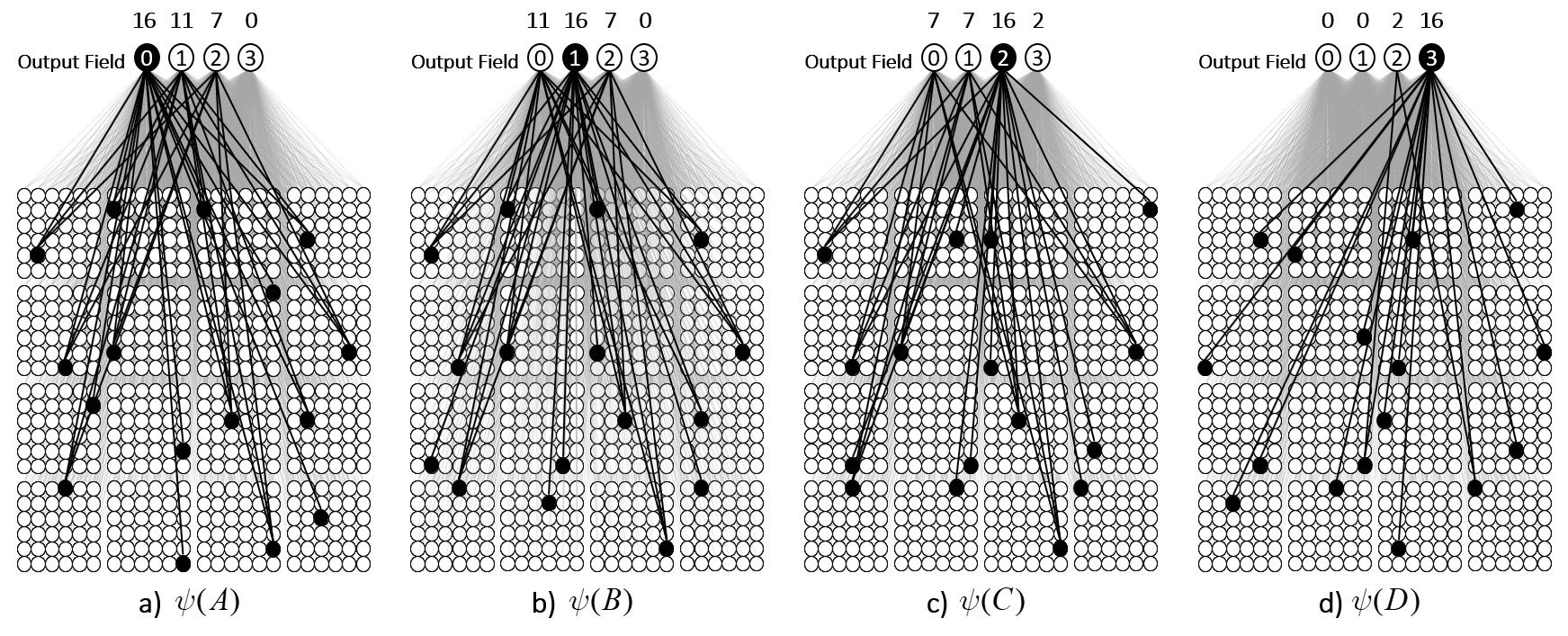
Now, having done those four operations in the past, suppose state A again comes into existence, i.e., the set ψ(A) activates, as in Fig. 4a. In this case, because of the weights we increased in that original event in the past (in Fig. 3a), the input summation to output unit “0” will be Q=16, output unit “1” will have summation |ψ(A)∩ψ(B)|=11, “2” will have sum |ψ(A)∩ψ(C)|=7, and “3” will have sum |ψ(A)∩ψ(D)|=0. Suppose we treat the output field as WTA: then, “0” becomes active and the other three remain inactive. In this case, the output field has indicated, i.e., observed, that the physical system is in state A. Note that these summations are due to (caused by): a) the subsets of units that are the intersections of the relevant states; and b) the pattern of weight increases that have been made to the matrix. And note that that pattern of weight increases is necessarily specific to the choices of units that comprise the four sets, ψ(A)-ψ(D).
Fig. 4: The input summations (at top) to the output units when each of the four states is presented after the weight increases in Fig. 3 were made.
Thus far, I’ve said only that these four states have a similarity relation that correlates with their representations’ intersection sizes. But let’s now get more specific and say that these four sets represent the four possible states of a very simple physical system, namely, a universe with one spatial dimension with four discrete positions, A-D, and one particle, x, which can move from one location to an adjacent one on any one time step, as in Fig. 5. Thus it has two properties, location and some basic notion of velocity. In this case, state A can be described as “x is at position A” or “x is distance 0 from A”, state B can be described as “x is at position B”, or “x is distance 1 from A”. Thus, the output unit labels in Figs. 3 and 4 reflect the distances from A. If x was in position A at t (i.e., Fig. 5a) and position B at t+1, then we could describe Fig. 5b as “x is in at position B, moving with speed 1”.
Fig. 5: A tiny 1-dimensional universe with four positions, A-D, and one particle, x, with two properties, location, and some primitive notion of velocity. That is, on any given time step, all it can do it move to an adjacent position, or stay where it is.
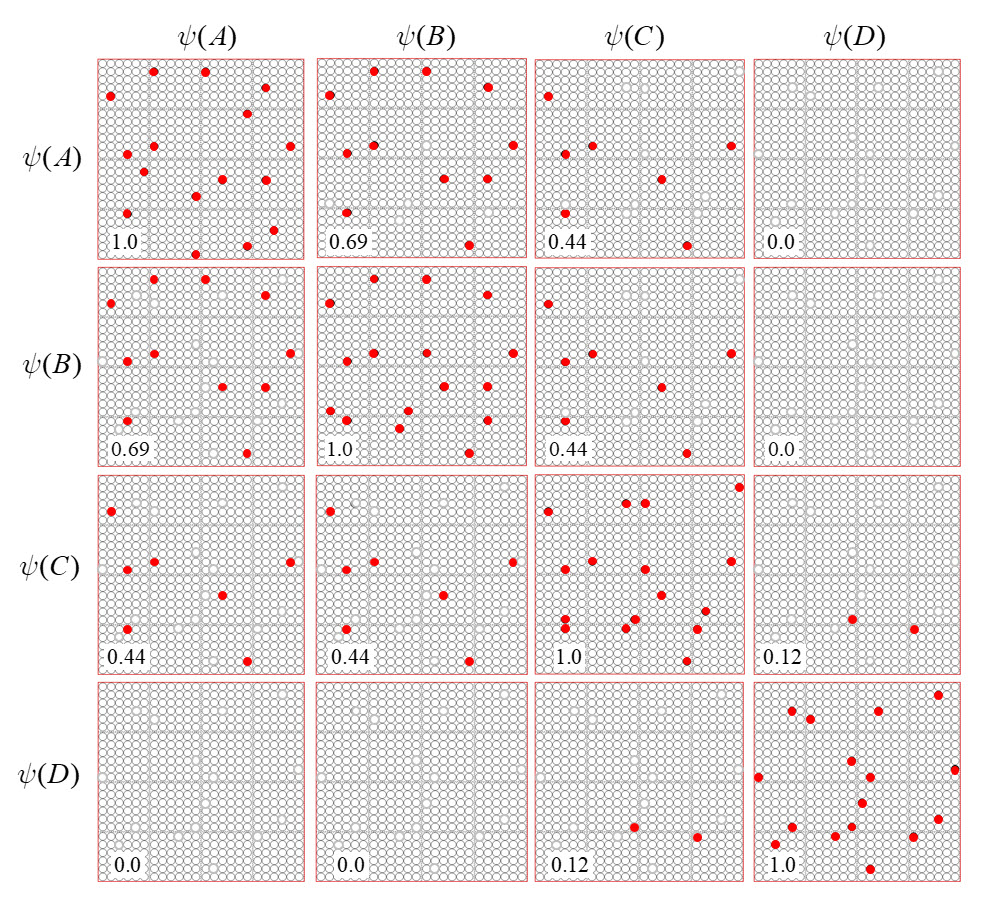
Now, suppose that instead of the output field functioning as WTA, we allow all its units to become active with strength proportional to their input sums normalized by Q. Then unit “0” is active at strength 16/16=1, unit “1” is active at strength 11/16 ≈ 0.69, unit “2” is active with strength 7/16 ≈ 0.44, and unit “3” at strength 0/16 = 0. The vector of output activities constitutes a similarity distribution over the states. And, if we grant that similarity correlates with likelihood, then it also constitutes a likelihood distribution. Furthermore, we could easily renormalize this likelihood distribution to a total probability distribution (by adding up the likelihoods and dividing the individual likelihoods by their sum). We can do the same analysis for each of other three states and the summations will be as shown at the top of Figs. 4b-d. Fig. 6 shows the complete pairwise intersection pattern of the four states (sets). The numbers show the fractional activation (likelihood) of a state when the state along the main diagonal is fully active. In all cases, we could normalize these distributions to total probability distributions, which would comport with the physical intuition that given some particular signal (evidence) indicating the position of a particle, progressively further locations should have progressively lower probabilities.
Fig. 6: Pairwise intersections of the states (sets). In each panel, the number is the fractional activation of the state when the state along the main diagonal is active. These numbers can be interpreted as likelihoods of the states, which are normalizable to total probabilities.
The State Update Operator
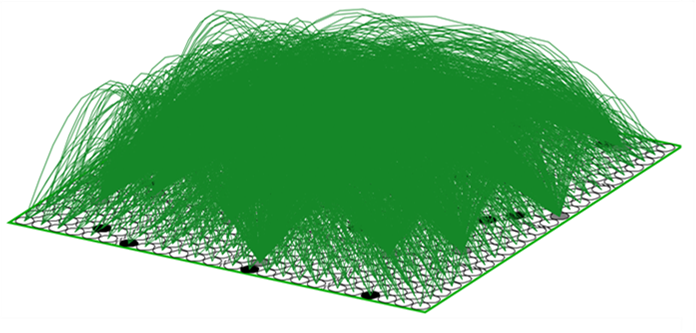
The simple example of Figs. 1-6 provides a mechanistic explanation of how a pattern of set intersections can represent, in fact, physically reify, a similarity measure, i.e., inverse distance measure, or in still other words, a dimension. But something more is needed. Specifically, in order for this dimension to truly have the semantics of a spatial dimension, there must be constraints on how the state can change through time. In Figs. 3 and 4, I’ve introduced a weight matrix to read out the state. But thus far I’ve provided no mechanism by which the state itself can change through time. Thus, we need some kind of operator that updates the state. And, this operator must enforce the natural constraint for a spatial dimension which is that movement along the dimension must be local. This is fundamental to our notion of what it means to be a spatial dimension. If, from one time step to the next, the particle could appear anywhere in the universe, then there is no longer any reasonable notion of spatial distance, i.e., all locations are the same distance away from the current location. Remember, the only thing in this universe is the particle x: so there is nothing else that distinguishes the locations except for the presence/absence of x. And, consequently, there is no notion of speed either. For simplicity, we’ll take the constraint to be that the position of the particle can change by at most one position on each time step. So, what is this operator? It’s a complete matrix of binary weights from F to itself, i.e., a recurrent matrix that connects every one of F’s bits to every one of F’s bits and a rule for how the signals sent via the matrix from the set active at t are used to determine the set that becomes active at t+1. Fig. 7 depicts a subset of the weights comprising this operator (green arcs).
Fig. 7: A depiction of the state-representing field, F, with a particular state (set) active and the complete recurrent binary matrix from F back to itself. Only a subset of the connections are shown (green arcs).
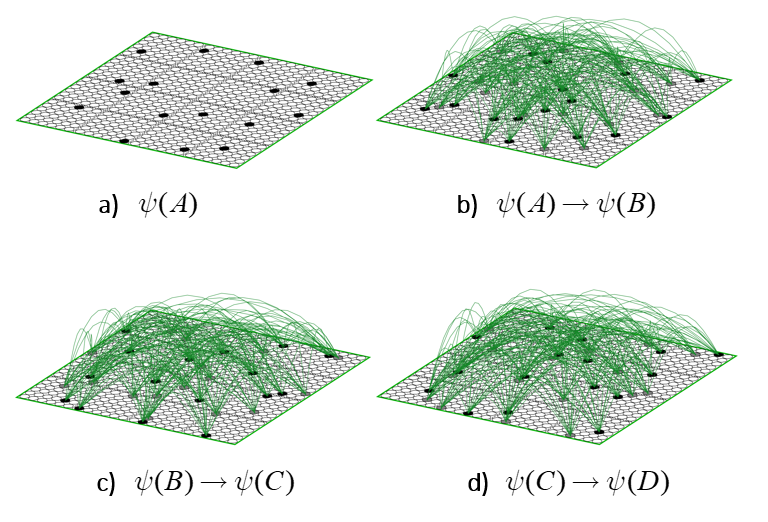
This operator works similarly to the read-out matrix. On each time step, t, the Q active units comprising the active state, ψ(t), send out signals via the matrix, which arrive back at F at t+1 and give rise to the next state, ψ(t+1). The algorithm by which the next state is chosen is quite simple: in each of the Q WTA modules, each of the K units evaluates its input summation and the unit with the max sum wins. An essential question is: how do we find a set of weights for the matrix that will enforce the desired dynamics? Well, imagine all weights are initially 0. Suppose we activate one of the states, say, ψ(A), time t. Then, at t+1, instead of running the WTA algorithm described above, we instead just manually turn on state ψ(B). Then, we simply increase all the weights from the Q active units at t to the Q active units at t+1, as in Fig. 8b, where the units active at t, ψ(A), are gray and the units active at t+1, ψ(B), are black. We can imagine doing this for all the other transitions that correspond to local movements: Figs. 8c,d shows this for the transitions from ψ(B) to ψ(C) and from ψ(C) to ψ(D). In this way, we embed the constraints on the system’s dynamics in the weight matrix. I believe that each of these transitions might correspond to instances of Jacob Barandes’s “stochastic microphysical operators”. Having performed these weight increase operations in the past, if ψ(A) ever becomes active in the future, then the update algorithm stated above will compute that each of the Q units comprising ψ(B) has an input sum of 16. Assuming that in such instances, those Q units indeed have the max sum in their respective modules, this will lead to the complete reinstatement of ψ(B). And similarly if we reinstated any of the other states as well.
Fig. 8: Depiction of the embedding of some of the state transitions into the matrix, i.e., into the state update operator.
Thus, we see that in this model, we build the operator. More precisely, to fully model a physical system, we need to choose the set of state representations, and we need to find a weight set, which is specific to the chosen sets, which enforces the system’s dynamics. A natural question then is: is there an efficient computational procedure that can do this? Yes. The model, i.e., data structure + algorithm, that can do it has been described multiple times [1-4], as a model of neural computation, specifically, as a model of how information is stored and retrieved in the brain. Crucially, the algorithm runs in fixed time. And, with few additional principles / assumptions, the entire process by which the algorithm builds constructs the model of the dynamics effectively has linear [“O(N)”] time complexity, where N is the number of states of the system. We’ll return to that in a later section.
Relation of Set-based formalism to QT’s vector-based formalism
You might be wondering how the model being described here relates to the canonical, vector-based formalism of quantum theory (QT), i.e., based on Hilbert space and the Schrodinger equation. Each of the state-representing sets, ψ(A)-ψ(D), are the basis functions. And, the binary weight matrix, together with the simple algorithm described above, is the operator. But here’s the crucial difference. The basis functions of QT are formally vectors and thus have the semantics of 0-dimensional points. This zero dimensionality, i.e., zero extension, of the represented entity is what allows the formalism to represent a basis state by a single (localized) symbol, i.e., using a localist representation. Fig. 9a shows this for the 4-state system we’ve been using: the four basis functions each has its own dedicated symbol and the four symbols are formally disjoint. But they are not merely formally disjoint: they are physically disjoint in any physical reification of the formalism in which operations are performed. We do not write all these symbols down on top of each other, i.e., superpose them, as in Fig. 9b. That becomes a blur and meaningless, and cannot be operated on by the formal mechanics of QT. Yes, we can abbreviate the fully expanded sum with a single symbol, i.e. the summation symbol (with the relevant indexes), as in Fig. 9c. But again, actual computations, i.e., applications of the Schrodinger equation to update the system, are formally outer products of the fully expanded summations, i.e., requiring 2Nx2N multiplications, where N is the number of basis functions.
Fig. 9: (a) QT’s fully expanded symbolic representation of a system with four basis states. (b) We do not physically superpose the terms representing the individual basis states: that becomes a meaningless blur. (c) The typical abbreviation of the fully expanded representation using the summation symbol.
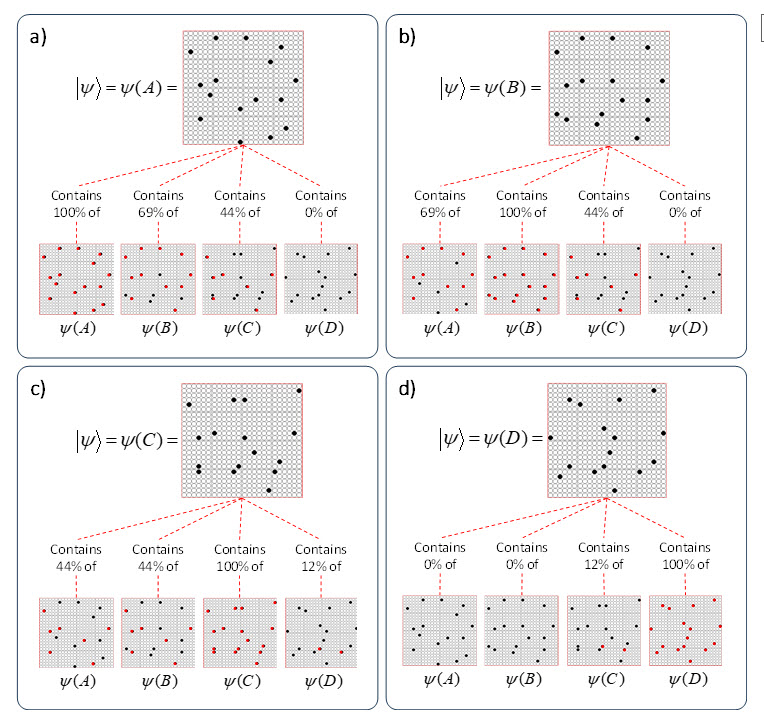
Comparing Fig. 10 to Fig. 9 shows the stark representational difference between my theory and QT. Fig. 10a shows the formal symbol, ψ(A), representing state A: it’s the set of Q=16 active (black) bits in the fermionic field. And below it we show the strengths of presence of each of the four basis states in state A (repeated from Fig. 2a). Thus these basis states are not orthogonal as are the basis states in QT’s Hilbert space representation. Again, the physical reification of each individual basis state, i.e., ψ(X), simultaneously is both: i) the state X at full strength because all Q of ψ(X)’s bits are active; and ii) all the other basis states, with strengths proportional to their intersections with ψ(x). Thus, unlike the situation for QT (i.e., Fig. 9b), when you look at any one of the four set-based representations in Fig. 10 you are looking at the physical superposition of all the system’s states, just with different degrees of strength for the different states depending on which state is fully active. This is superposition realized in a purely classical way, as set intersection. There is no blurriness and the active sparse set is directly operated on by the mechanics of the formalism. And, crucially, that operation consists of a number of atomic operations that depends on the number of physical representational units (the number of bits comprising F), not on the number of represented basis states. Also, unlike the formalism of QT, the representation of the basis states per se and of the probabilities of the states (which in QT are formally probability amplitudes, but in my theory, are formally likelihoods) per se are formally co-mingled: all of the information about the state is distributed out homogeneously throughout all Q of its bits.
Fig. 10: Illustration of the representations of the basis states and of the superposition in the set-based theory. Every basis state is both itself and a superposition of all the states. Panel a depicts the fractional strengths of presence of each of the four states when state A is fully active (i.e., when all Q of ψ(A)’s bits are active). The other panels show this for the three other basis states. In each panel, the red bits are those that intersect with the fully active set.
The stark difference described above all comes down to the fact that in QT, states are represented by vectors but in my theory, they are represented by sets. A vector is formally equivalent to a point in the vector space. A point is a 0-dimensional object, i.e., it has no extension. But a set fundamentally does have extension. This is because the elements of a set are unordered (whereas those of a vector are ordered). This means that from an operational standpoint, there is no shorter representation of a set than to explicitly “list”, i.e., explicitly activate, all its elements. While we can assign a single symbol, e.g., “ψ(A)”, as the name of a set, the formal representation of any operation on a set must include symbols representing every element in the set. Thus, to specify the outcome of the application of the state update operator at time t+1, we must show you the full matrix of weights, i.e., the state of every weight, or at least the state of every weight leading from every active element at t, as in Fig. 8. The unorderedness of sets has crucial implications regarding the physical realizations of the formal objects and of the operations on the formal objects. This relates directly to Jacob Barandes’s “category problem” of QT, which concerns the relation between “happening” and “measuring”. See his talk.
..Next Section coming soon…
I’ll continue to explain and elaborate on how the functionality of superposition is fully achieved by classical set intersection. In particular, “fully achieving the functionality” includes achieving the computational efficiency (i.e., exponential speed-up) of quantum superposition.
And, I’ll fully explain the completely classical explanation of entanglement that comes with this theory based on representing states by sparse sets. An essay of mine from 2023 already explains entanglement in my formalism, but it needs updating.
I’ll elaborate on how this core theory generalizes to explain how the three large-scale spatial dimensions of the universe are emergent. This has already been explained at length in an earlier essay (2021), but that also needs significant updating.
I’m continuing to learn a lot about some other quantum foundation theories, i.e., Barandes’ “Indivisible Stochastic Processes”, Finster’s “Causal Fermions”, and “Causal Sets”, and will be elaborating on the relationships that exist between those theories and mine. But, it is immediately clear from their lectures that at least the latter two are vector-based theories (despite their names). And it is true that none of these three theories has yet proposed a physical underpinning of the probabilities, as I have.
References
Rinkus, G., A Combinatorial Neural Network Exhibiting Episodic and Semantic Memory Properties for Spatio-Temporal Patterns, in Cognitive & Neural Systems. 1996, Boston U.: Boston.
Rinkus, G., A cortical sparse distributed coding model linking mini- and macrocolumn-scale functionality. Frontiers in Neuroanatomy, 2010. 4.
Rinkus, G. A Radically New Theory of How the Brain Represents and Computes with Probabilities. in Machine Learning, Optimization, and Data Science. 2024. Champlinaud: Springer Nature Switzerland.
Rinkus, G.J., Sparsey™: event recognition via deep hierarchical sparse distributed codes. Frontiers in Computational Neuroscience, 2014. 8(160)
Entanglement is usually described in terms of a physical theory, namely quantum theory (QT), wherein the entities formally represented in the theory are physical entities, e.g., electrons, photons, composites (ensembles) of any size. In contrast, I will describe entanglement in the context of an information processing model in which the entities formally represented in the theory are items of information. Of course, any item of information, even a single bit, is ultimately physically reified somewhere, even if only in the physical brain of a theoretician imagining the item. So, we might expect the two descriptions of entanglement, one in terms of a physical theory and the other in terms of an information processing theory, to coalesce, to become equivalent, cf. Wheeler’s “It from Bit”. This essay works towards that goal.
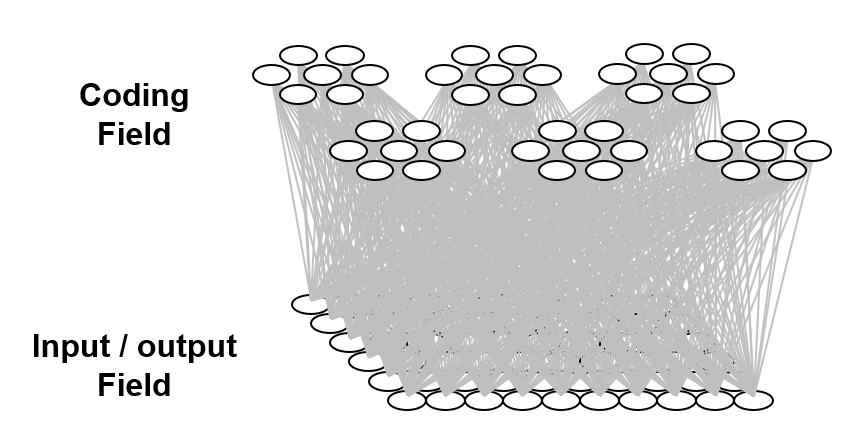
The information processing model used here is based on representing items of information as sets, specifically, (relatively) small subsets, of binary representational units chosen from a much larger universal set of these units. This type of representation has been referred to as a sparse distributed representation (SDR) or sparse distributed code (SDC). We’ll use the term, SDC. Fig. 1 shows a small toy example of an SDC model. The universal set, or coding field (or memory), is organized as a set of Q=6 groups of K=7 binary units. These groups function in winner-take-all (WTA) fashion and we refer to them as competitive modules (CMs). The coding field is completely connected to an input field of binary units, organized as a 2D array (e.g., a primitive retina of binary pixels), in both directions, a forward matrix of binary connections (weights) and a reverse matrix of binary weights. All weights are initially zero. We impose the constraint that all inputs have the same number of active pixels, S=7.
Fig. 1: Small example of an SDC-based model. The coding field consists of Q=6 competitive modules (CMs), each consisting of K=7 binary units. The input field is a 2D array of binary units (pixels) and is completely connected in both directions, i.e., a forward and a reverse matrix of binary weights (grey lines, each on represents both the forward and the reverse weight).
The storage (learning) operation is as follows. When an input item, Ii, is presented (activated in the input field), a code, φ(Ii) consisting of Q units, one in each of the Q CMs, is chosen and activated and all forward and reverse weights between active input and active coding field units are set to one. In general, some of those weights may already be one due to prior learning. We will discuss the algorithm for choosing the codes during learning in a later section. For now, we can assume that codes are chosen at random. In general, any given coding unit, α, will be included in the codes of multiple inputs. For each new input in whose code α is included, if that input includes units (pixels) that were not active in any of the prior inputs in whose codes α was included, the weights from those pixels to α will be increased. Thus, the set of input units having a connection with weight one onto α can only increase with time (with further inputs). We call that set of input units with w=1 onto α, α’s tuning function (TF),
The retrieval operation is as follows. An input, i.e., a retrieval cue, is presented, which causes signals to travel to the coding field via the forward matrix, whereupon the coding field units compute their input summations and the unit with the max sum in each CM is chosen winner, ties broken at random. Once this “retrieved” code is activated, it sends signals via the reverse matrix, whereupon, the input units compute their input summations and are activated (or possibly deactivated) depending on whether a threshold is exceeded. In this way, partial input cues, i.e., with less than S active units, can be “filled in” and novel cues that are similar enough to previously (learned) inputs can cause the codes of such closest-matching learned inputs to activate, which can then cause (via the reverse signals) activation of that closest-matching learned input.
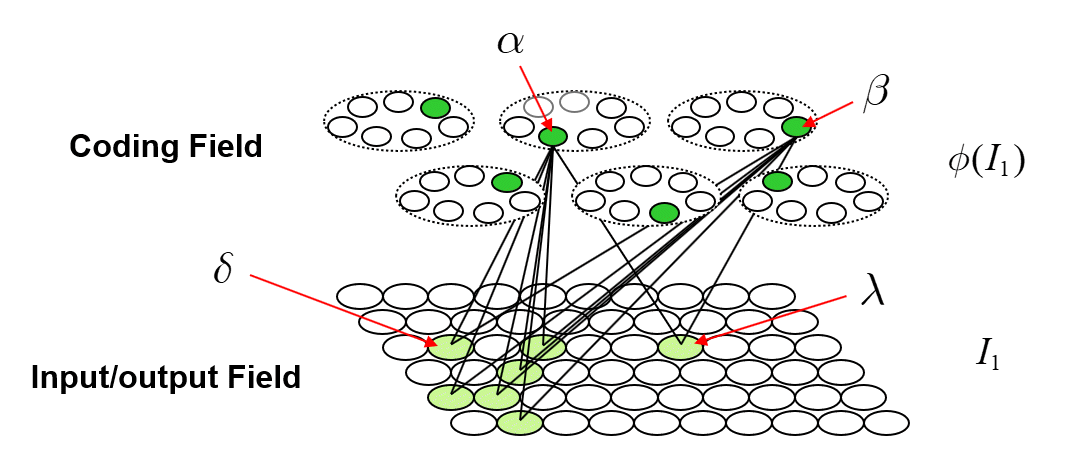
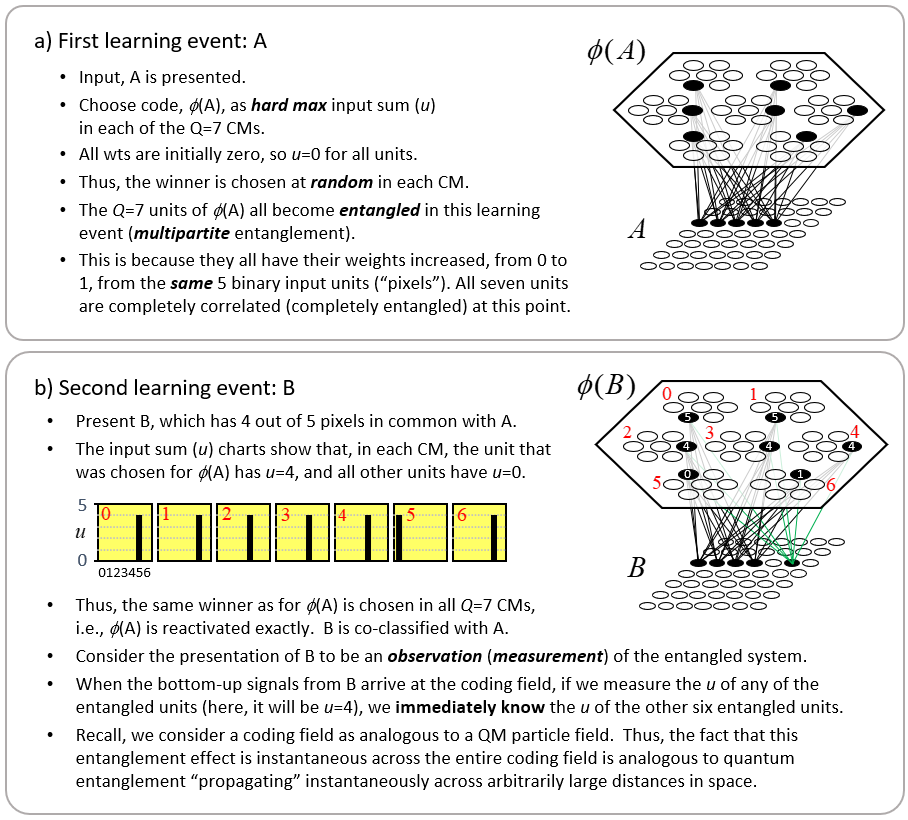
With the above description of the model’s storage and retrieval operations in mind, I will now describe the analog of quantum entanglement in this classical model. Fig. 2 shows the event of storing the first item of information, I1, into this model. I1 consists of the S=7 light green input units. The Q=6 green coding field units are chosen randomly to be I1‘s code, φ(I1), and the black lines show some of the QxS=42 weights that would be increased, from 0 to 1, in this learning event. Each line represents both the forward and reverse weight connecting the two units. More specifically, the black lines show all the forward/reverse weights that would be increased for two of φ(I1)’s units, denoted α and β. Note that immediately following this learning event (the storage of I1), α and β have exactly the same TF. In fact, all six units comprising φ(I1) have exactly the same TF. In the information processing realm, and more pointedly in neural models, we would describe these six units as being completely correlated. That is, all possible next inputs to the model, a repeat presentation of I1 or any other possible input, would cause exactly the same input summation to occur in all six units, and thus, exactly the same response by all six units. In other words, all six units carry exactly the same information, i.e., are completely redundant.
Fig. 2: The first input to the model, I1, consisting of the S=7 light green units, has been presented and a code, φ(I1), consisting of Q=6 units (green), has been chosen at random. All forward and reverse weights between active input and coding fields units are set to one. The black lines show all such weights involving coding units α and β.
As the reader may already have anticipated, I will claim that these six units are completely entangled. We can consider the act of assigning the six units as the code, φ(I1), as analogous to an event in which a particle decays, giving rise, for example, to two completely entangled photons. In the moment when the two particles are born out of the vacuum, they are completely entangled and likewise, in the moment when the code, φ(I1), is formed, the six units comprising it are completely entangled. However, in the information processing model described here, the mechanism that explains the entanglement, i.e., the correlation, is perfectly clear: it’s the correlated increases to the forward/reverse weights to/from the six units, which entangles those units. Note in particular, that there are no direct physical connections between coding field units in different CMs. This is crucial: it highlights the fact that in this explanation of entanglement, the hidden variables are external, i.e., non-local, to the units that are entangled. The hidden variables ARE the connections (weights). This hints at the possibility that the explanation of entanglement herein comports with Bell’s theorem. The 2015 results proving Bell’s theorem, explicitly rule out only local hidden variables explanations of entanglement. Fig. 3 shows the broad correspondence between the information theory and the physical theory proposed here.
Fig. 3: Broad correspondence between the information processing theory described here (and previously throughout my work) and the proposed physical theory. This figure will generalized in a later section to include the recurrent matrix that connects the coding field to itself (and is also part of the bosonic representation), which is needed to explain how the physical state represented by the coding field is updated through time, i.e. the dynamics.
Suppose we now activate just one of the seven input units comprising I1, say δ. Then φ(I1) will activate in its entirety (i.e., all Q=6 of its units) due to the “max sum” rule stated above, and then the remaining six input units comprising I1 will be activated based on the inputs via the reverse matrix. Suppose we consider the activation of δ to be analogous to making a measurement or observation. In this interpretation, the act of measuring at one locale of the input field, at δ, immediately determines the state of the entire coding field and subsequently (via the reverse projection) the entire state of the input field [or more properly, input/output (“I/O”) field], in particular, the state of the spatially distant I/O unit, λ. Note that there is no direct connection between δ and λ. The causal and deterministic signaling went, in one hop, via the connections of the forward and reverse matrices. Thus, while our hidden variables, the connections, are strictly external (non-local) to the units being entangled (i.e., the connections are not inside any of the units, either coding units or I/O units), they themselves are local in the sense of being immediately adjacent to theentangled units. Thus, this explanation meets the criteria for local realism. This highlights an essential assumption of my overall explanation of quantum entanglement. It requires that physical space, or rather the underlying physical substrate from which our apparent 3D space and all the things in it emerge, be composed of smallest functional units that are completely connected. In another essay, I call these smallest functional, or atomic functional, units, “corpuscles”. Specifically, a corpuscle is comprised of a coding field similar to, but vastly larger than (e.g., Q=106, K=1015), those depicted here and: a) a recurrent matrix of weights that completely connects the coding field to itself; and b) matrices that completely connect the coding field to the coding fields in all immediately neighboring corpuscles. In particular, the recurrent matrix allows the state of the coding field at T to influence, in one signal-propagation step, the state of the coding field at T+1. Thus, to be clear, the explanation of entanglement given here applies within any given corpuscle. It allows instantaneous, i.e., faster than light, transmission of effects throughout the region of (emergent) space corresponding to the corpuscle, which I’ve proposed elsewhere to be perhaps 1015 Planck lengths in diameter. If we define the time, in Planck times, that it takes for the corpuscle to update its state to equal the diameter of corpuscle, in Planck lengths, then signals (effects) are limited to propagating across larger expanses, i.e., from one corpuscle to the next, no faster than light.
Here I must pause to clarify the analogy. In the typical description of entanglement within the context of the standard model (SM), it is (typically) the fundamental particles of the SM, e.g., electrons, photons, which become entangled. In the explanation described here, it is the individual coding units that become entangled. But I do not propose that that these coding field units are analogous to individual fundamental particles of the standard model (SM). Rather, I propose that the fundamental particles of the SM correspond to sets of coding field units, in particular, to sets of size smaller than a full code, i.e., smaller than Q. That is, the entire state of the region of space emerging from a single corpuscle is a set of Q active coding units. But a subset of those Q units might be associated with any particular entity (particle) present in that region at any given time. For example, a particular set of coding units, say of size Q/10, might always be active whenever an electron is present in the region, i.e., that “sub-code” appears as a subset in all full codes (of size, Q) in which an electron is present. Thus, rather than saying that, in the theory described here, individual coding units become entangled, we can slightly modify it to say that subsets of coding units become entangled.
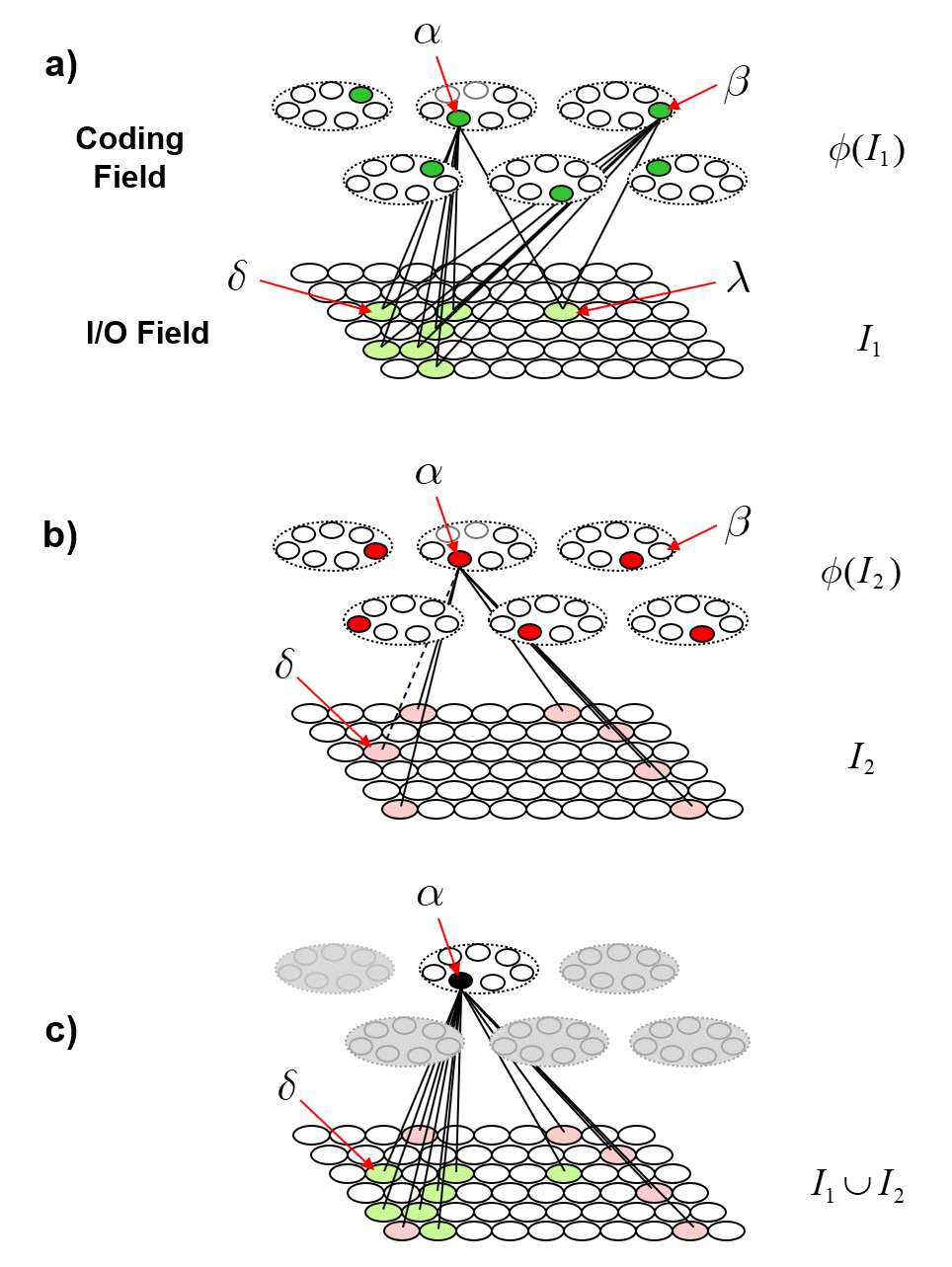
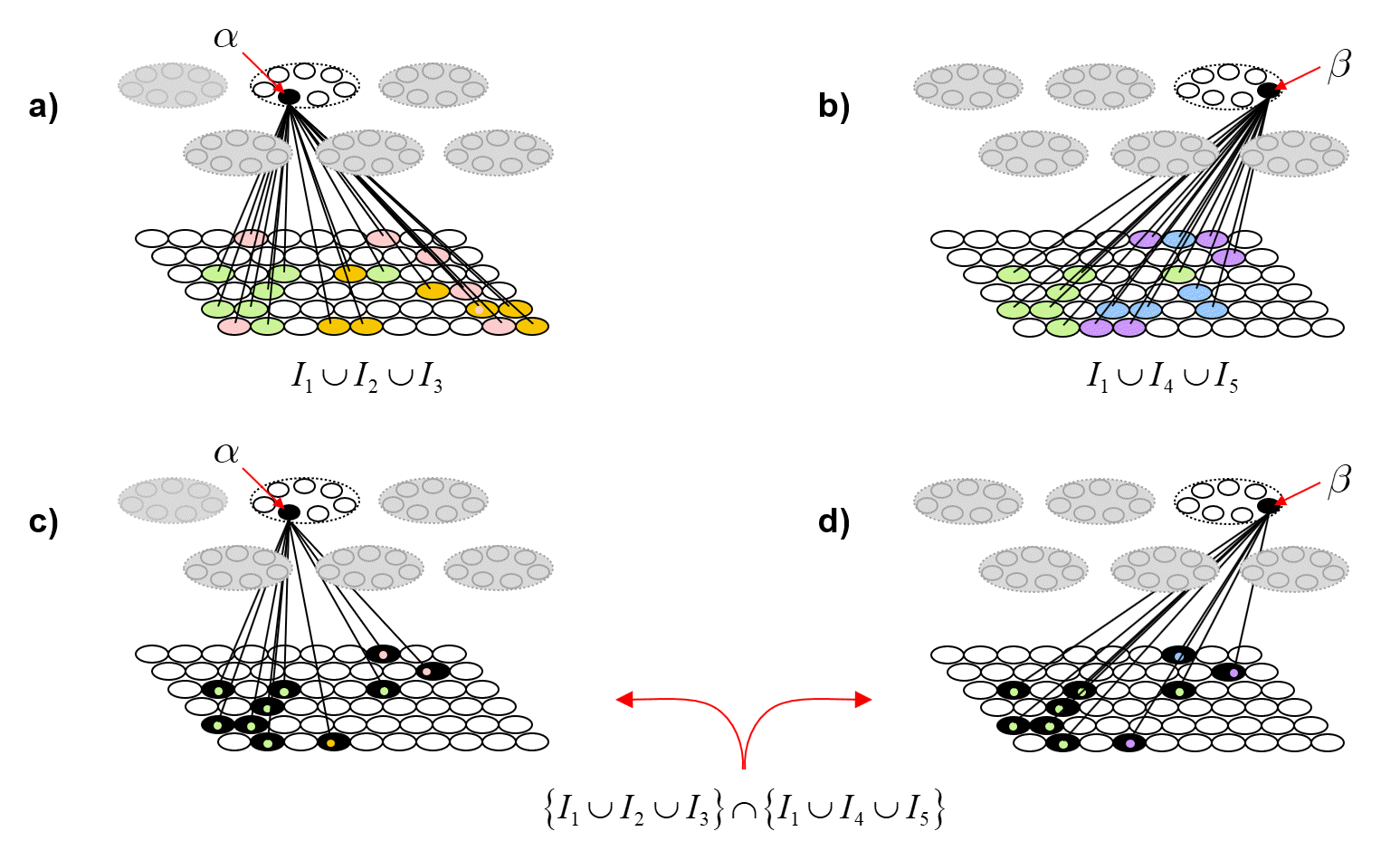
Returning to the main thread, Fig. 4 now describes how patterns of entanglement generally change over time. Fig. 4a is a repeat of Fig. 2, showing the model after the first item, I1, is stored. Fig. 4b shows a possible next input, I2, also consisting of S=7 active I/O units, one of which, δ is common to I1. Black lines depict the connections whose weights are increased in this event. The dotted line is to indicate that the weights between α and δ will have been increased when I1 was presented. Fig. 4c shows α’s TF after I2 was presented. It now includes the 13 I/O units in the union of the two input patterns, {I1 ∪ I2}. In particular, note that coding units, α and β are no longer completely correlated, i.e., their TFs are no longer identical, which means that we could find new inputs that elicit different responses in α and β. In general, the different responses, can lead, via reverse signals, to different patterns of activation in the I/O field, i.e., different values of observables. In other words, they are no longer completely entangled. This is analogous to two particles which arise completely entangled from a single event, going off and having different histories of interactions with the world. With each new interaction that either one has, they become less entangled. However, note that even though α and β are no longer 100% correlated, we can still predict either’s state of activation based on the other’s at better-than-chance accuracy, due to the common units in their TFs and to the corresponding correlated changes to their weights.
Fig. 4: (a) Repeat of Fig. 2 for reference. (b) Presentation of the second input, I2, its randomly selected code, φ(I2), and the new learning involving coding unit α. The weights to/from I/O unit δ are dashed since they were already increased to one when I1 was presented, i.e., δ was active in both inputs. (c) α’s TF is the union of all I/O units that are active in any input in whose code α was included. In particular, α and β are no longer completely entangled (correlated), due to this additional interaction α has had with the world.
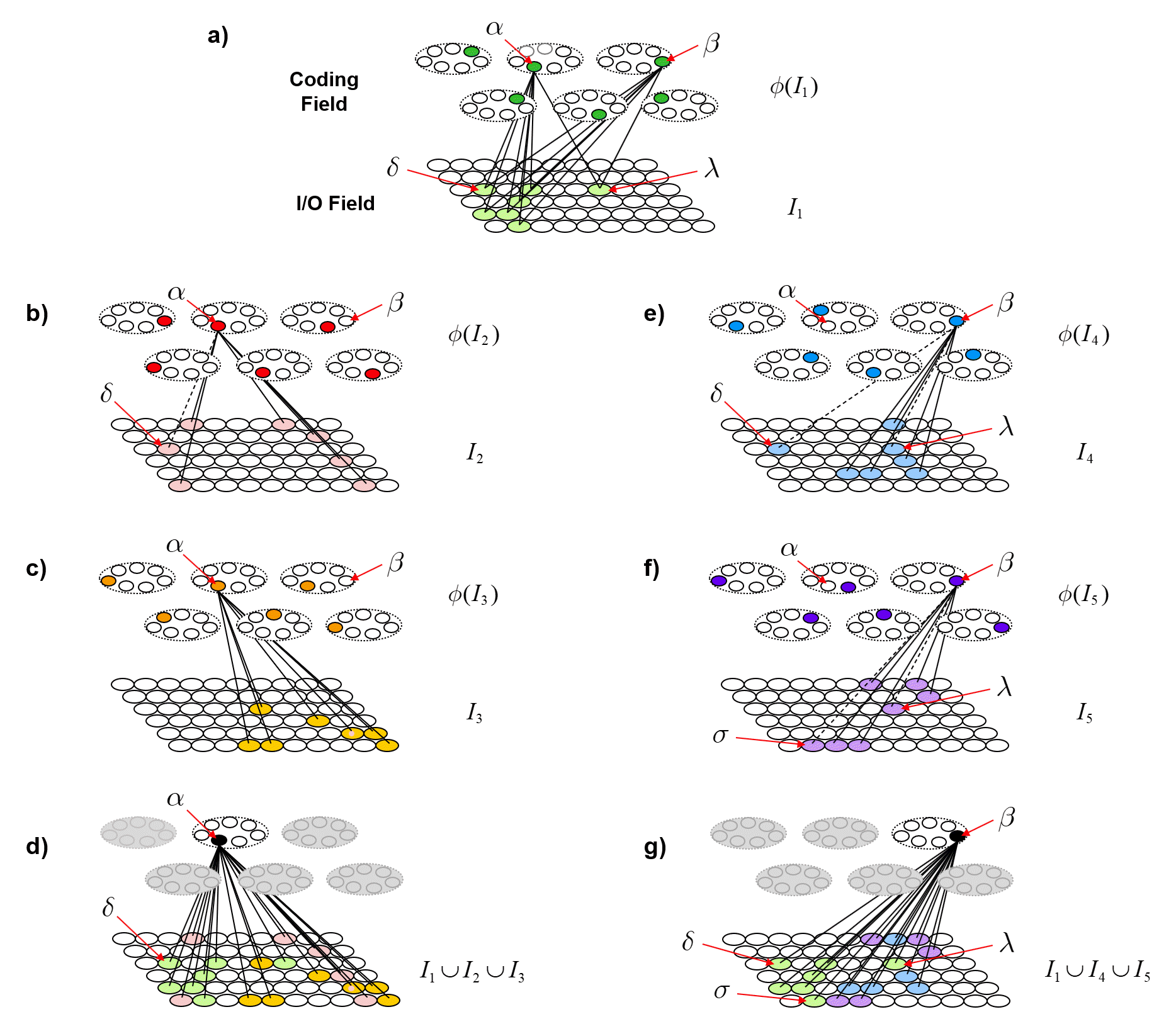
Fig. 5 now shows a more extensive example illustrating the further evolution of the same process shown in Fig. 4. In Fig. 5, we show coding unit α participating in a further code, φ(I3), for input I3. And we show coding unit β participating in the codes of two other inputs, I4 and I5, after participating, along with α, in the code of the first input, I1. Panel d shows the final TF for α after being used in codes of three inputs, I1, I2 and I3. Panel g shows the final TF for β after being used in the codes for I1, I4 and I5. One can clearly see how the TFs gradually diverge due to their diverging histories of usage (i.e., interaction with the world). This corresponds to α and β becoming progressively less entangled with successive usages (interactions).
Fig. 5: Depiction of the continued diminution of the entanglement of α and β as they participate in different histories of inputs. Panel d shows the final TF for α after being used in codes of three inputs, I1, I2 and I3. Panel g shows the final TF for β after being used in the codes for I1, I4 and I5.
To quantify the decrease in entanglement precisely, we need to do a lot of counting. Fig. 6 shows the idea. Figs. 6a and 6b repeat Figs. 5d and 5g, showing the TFs of α and β. Figs. 6c and 6d show the intersection of those two TFs. The colored dots indicate the input from which the particular I/O unit (pixel) was accrued into the TF. In order for any future input [including any repeat of any of the learned (stored) ones] to affect α and β differently (i.e., to cause α and β to have different input sums, and thus, to have different chances of winning in their respective CMs, and thus, to ultimately cause activation of different full codes), that code must include at least one I/O unit that is in either TF but not in the intersection of the TFs. Again, all inputs are constrained to be of size S=7. Thus, after presenting any input, we can count the number of such codes that meet that criterion. Over long histories, i.e., for large sets of inputs, that number will grow with each successive input.
Fig. 6: (a,b) Repeats of Figs. 5d and 5g showing the TFs of α and β. (c,d) The union of the two TFs (black cells). The colored dots tell from which input the I/O unit (pixel) was accrued into the relevant coding unit’s TF.
A storage (learning) algorithm that preserves similarity
In the examples above, the codes were chosen randomly. While we can and did provide an explanation of entanglement under that assumption, a much more powerful and sweeping physical theory emerges if we can provide a tractable mechanism (algorithm) for choosing codes in a way that statistically preserves similarity, i.e., maps similar inputs to similar codes. In this section, I will describe that algorithm. The final section will then revisit entanglement, providing further elaboration.
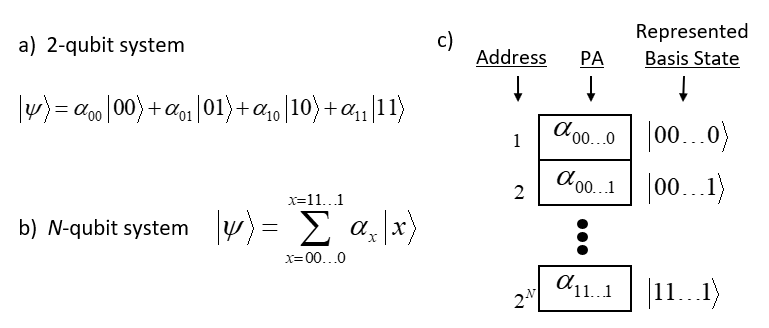
In this essay, I’ll explain how quantum parallelism can be achieved on a classical machine. Quantum parallelism is usually described as the phenomenon in which a single physical operation, e.g., the execution of a Hadamard gate on an N-qubit memory of a quantum computer, physically affects (updates) the representations of multiple entities, e.g., of all 2N basis states held in quantum superposition in the N-qubit memory. This is the source of the idea that quantum computation is exponentially faster than classical computation. It seems that almost no one working in quantum computing believes quantum parallelism is realizable on classical hardware, i.e., with plain old bits. I believe this is due to the implicit assumption of localist representation in the mathematical formalism, inherited from quantum mechanics, which underlies mainstream quantum computing approaches.
A localist representation is one in which each represented entity is represented by its own distinct representational unit (hereafter “unit” when not ambiguous), i.e., disjointfrom the representations of all other entities. The localist representation present in quantum computing is clear in Figure 1. The 2-qubit system of Fig. 1a has 22=4 basis states. Each state is represented by its own symbol, e.g., |00⟩, with its own complex-valued probability amplitude (PA), e.g., α00. Fig. 1b gives the expression for an N-qubit system, which has 2N basis states (assume index var, x, has N places). Figure 1c shows a localist representation of the PAs, and thus, effectively, of the basis states themselves, of the N-qubit system, stored in a classical computer memory. Each PA resides in its own separate physical memory location. Therefore, performing a physical operation on any one PA, e.g., the physical act of changing one of its bits, produces no effect on any of the other 2N-1 PAs. I believe that this localist assumption apparent in Fig. 1c is what underlies the virtually unanimous opinion that simulating quantum computation on a classical machine takes exponential resources, both spatially (number of memory locations) and temporally (number of atomic operations needed).
Figure 1: Localist Nature of the Formalism of Quantum Mechanics and Mainstream Quantum Computing.
The “Quantum Leap” in Computing is a Change of Representation, not Hardware
If, instead of localist representations, entities are represented by distributed, and more specifically, sparse distributed, representations (hereafter SDRs), then the power of quantum computation—specifically, quantum parallelism—can be achieved with sub-exponential resources, both in space and time, on a classical machine. As we will see, this is because when entities are represented as SDRs, plain old classical superposition, i.e., representing entities as sets, specifically, sparse sets,of physical objects, i.e., of classical bits, which can intersect, provides the capability described as quantum parallelism.
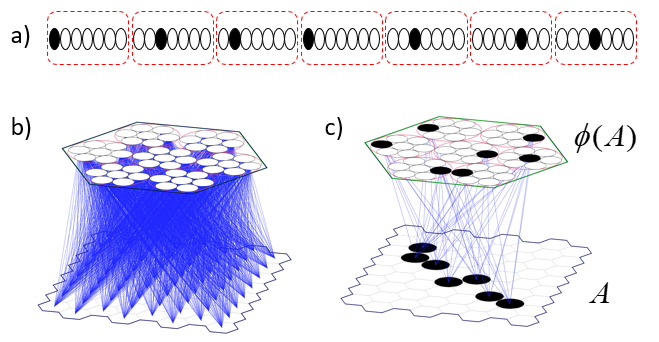
In particular, the SDRs in the model I’ll be describing, Sparsey (1996, 2010, 2014, 2017), are small setsof binary units chosen from a much larger “coding field“, where these SDRs (sets) can intersect to arbitrary degrees. This raises the possibility of using the size of intersection of two SDRs to represent the similarity of the entities (items) they represent. We’ll refer to this property as similar-inputs-to-similar-codes, or “SISC” (n.b.: “code” is synonymous with “representation”). Fig. 2 shows the structure of a Sparsey coding field. Fig. 2a shows one in a linear format: it is a set of Q winner-take-all (WTA) competitive modules (CMs) (red dashed boxes), each consisting of K binary units. Here, Q=7 and K=7 (in general, they can be different). A particular code, consisting of Q active (black) units, one in each CM, is active in the field. N.b.: All codes stored in this field will be of the same size, Q. The total number of unique codes that can be represented, the codespace, is KQ. Fig. 2b shows a 3D view of the field in hexagonal format. It also shows an 8×8 input field of binary pixels, which is fully (completely) connected to the coding field via a binary weight matrix (blue lines). Fig. 2c shows an example active input, A (e.g., a small visual line/edge ), an active code, φ(A), chosen to represent A, and the weights (blue lines) that would be increased (from 0 to 1) from the active input pixels to active coding units, to store A.
Figure 2: Structure of a Sparsey SDR coding field.
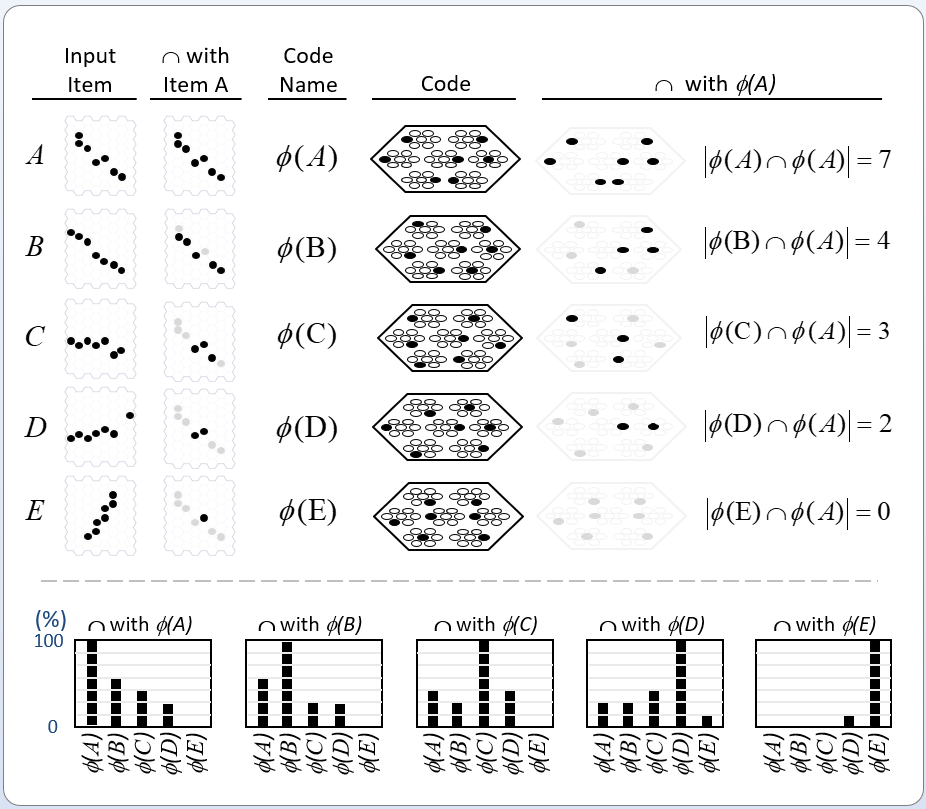
Figure 3 (below) illustrates the basis for quantum parallelism in a Sparsey SDR coding field. The top row shows the notional input, A , and corresponding SDR (Code), φ(A), from Fig. 2c. The next four rows then show progressively less similar inputs (measured as pixel overlap), B-E, and corresponding SDRs, φ(B)-φ(E), which were manually chosen to exemplify SISC. The second and last columns show that code similarity, measured as intersection, correlates with input similarity. Note that while the codes were manually chosen in this example, Sparsey’s unsupervised learning algorithm, the Code Selection Algorithm (CSA) (summarized in this section) finds such SISC-respecting codes in fixed-time. The bottom row (below dashed line of Fig. 3) then reveals the following crucial property.
Whenever any ONE particular code is fully active, i.e., all Q of its units are active, ALL other codes stored in the field will also be simultaneously physically active with degree (i.e., strength) proportional to their intersections with the single fully active code.
Thelikelihood (unnormalized probability) of a basis state is represented by the fraction of its code’s units that are physically active, i.e., by a set of co-active physical units. This contrasts fundamentally to quantum mechanics in which the probability of a basis state is represented by complex number.
For example, the leftmost chart shows that when φ(A) is fully active, φ(B)-φ(E) are active with appropriately decreasing strength. And similarly, when any of the other four codes is fully active (the other four charts). I emphasize that the modular organization of the coding field, i.e., the division of the overall coding field into Q winner-take-all (WTA) modules, is very important. As described here, it confers computational efficiencies over any “flat field” implementation of SDR (as in Kanerva’s SDM model and its various descendants, e.g., Numenta’s HTM). In addition, Sparsey’s WTA module has a clear possible structural analog in the brain’s cortex, i.e., the minicolumn (as discussed in Rinkus 2010). One manifestation of the exponential increase in computational efficiency provided by SDR (assuming the learning algorithm preserves similarity) was previously described in this 2015 post.
Figure 3: With SDR, All Stored Codes Are Simultaneously Physically Active in Classical Superposition. Figure adapted from 2012 paper.
We must take some time to dwell on the property shown in Fig. 3 (and stated in bold above) because it’s really at the heart of this essay and of my argument. It shows that when entities, e.g., basis states, are formally represented as sets, as opposed to vectors (as is the case in quantum mechanics),
purely classical superposition provides the functionality of quantum superposition.
What do I mean by this? Well first, consider Copenhagen, the prevailing interpretation of quantum mechanics (hereafter “QM“). It says that at every moment, ALL basis states of a physical system exist simultaneously in quantum superposition and that there is a probability distribution over those states giving the probability that each particular state would be observed if the system is observed. So that’s the functionality of quantum superposition: allowing ALL physical states to exist in the same space at the same time, with a probability distribution over the states.
The problem is that Copenhagen has never, in a 100 years (!), provided a physical explanation of how multiple different physical states can exist in the same space at the same time. Instead, they have been forced to assert that the probability distribution, which is formally a mathematical, not a physical object, is somehow more physically real than the physical basis states themselves.
Now consider what’s being shown in Fig. 3. It’s purely classical. The individual units are bits, not qubits. Yet, as the charts at bottom of the Fig. 3 show, whenever any one code is active, ALL stored codes are simultaneously proportionally physically active. This constitutes a physically straightforward and immediately apparent explanation of how multiple, in fact, ALL, stored codes, can simultaneously physically exist in the same space, where here, the “space” is the (physically instantiated) SDR coding field. We underscore three keys to this explanation.
The codes (SDRs) are highly diffuse (sparse).
The SDRs are formally sets comprised of multiple (specifically, Q) atomic physical units (the binary units of the coding field), or in other words, they are “distributed”. This is essential because it admits a straightforward physical interpretation of what it means for a stored code to be partially active, namely that a code is active with strength proportional to the fraction of its Q units that are active.
Every code is spread out, again diffusely, throughout the entire coding field. This is enforced by the modular structure of the coding field, i.e., the fact that it is broken into Q WTA modules and every SDR must consist of one winner in each module.
To be sure, in Fig. 3, we’re talking about classical superposition of codes, in particular, of SDRs, which represent physical states (e.g., basis states of an observed system), not about superposition of the physical states themselves. So, we’re not, in the first place, in the realm of QM per se, which was developed as an explanation of physical reality, i.e., of physical objects/systems, and their dynamics, irrespective of whether or not such objects/systems represent information. However, we are exactly in the realm of quantum computing. That is, a quantum computer, like any classical computer, is a physical system for representing and processing informational objects. In a quantum computer, as in any classical computer, it is representations of states (of some other system, e.g., of entries in a database, of states of some simulated physical system, e.g., a system of molecules) and representations of their transitions (dynamics), not the states/transitions themselves, that are physically reified (e.g., in memory).
At the outset, I asserted that the essential problem with mainstream quantum computing is that the founders of QM and of quantum computing were thinking as “localists”. But from another vantage point, the essential problem was the original formalization of QM in terms of vector spaces, specifically Hilbert spaces, rather than sets. In QM, all entities (and compositions of entities, i.e., entities of any scale, from fundamental particles to macroscopic bodies) are formally vectors, and thus are formally equivalent to points, i.e., have the semantics of entities with zero extension. As such it is immediately clear that there can be no formal concept of graded degrees of intersection of entities in QM. It is therefore not surprising that none of the founders of QM, Bohr, Heisenberg, Schrodinger, Born, Dirac—who were all thinking in terms of a vector-based (thus, point-based) formalism—ever developed any physically intuitive (commonsense) explanation of how multiple entities (world states) could simultaneously be partially active (i.e., at different graded levels/strengths) in the same space. This most fundamental of axioms, adopted by QM’s founders, to represent physical entities as vectors, i.e., 0-dimensional points, is precisely what prevented any of those founders from seeing, apparently from ever even entertaining the idea, that classical superposition can provide the full functionality of quantum superposition, and thus can realize can realize what is termed quantum parallelism in the language of QC. But as explained here (most pointedly, with respect to Fig. 3, but throughout), in the realm of information processing, when entities (informational objects) are formally represented as sets, partial (graded) degrees of existence have an obvious and simple classical physical realization (again, as just the fraction of the elements of the set representing an entity that is active). I predict that this change—from vectors to sets, and from localist representations to SDRs—will constitute a “sea change” for quantum computing, and by extension for QM. For yet other implications of the difference between representing entities formally as sets vs vectors, see my earlier post on “Learning Multidimensional Indexes”.
More on the Relation of Quantum Parallelism to the Localist vs. Distributed Representation Dichotomy
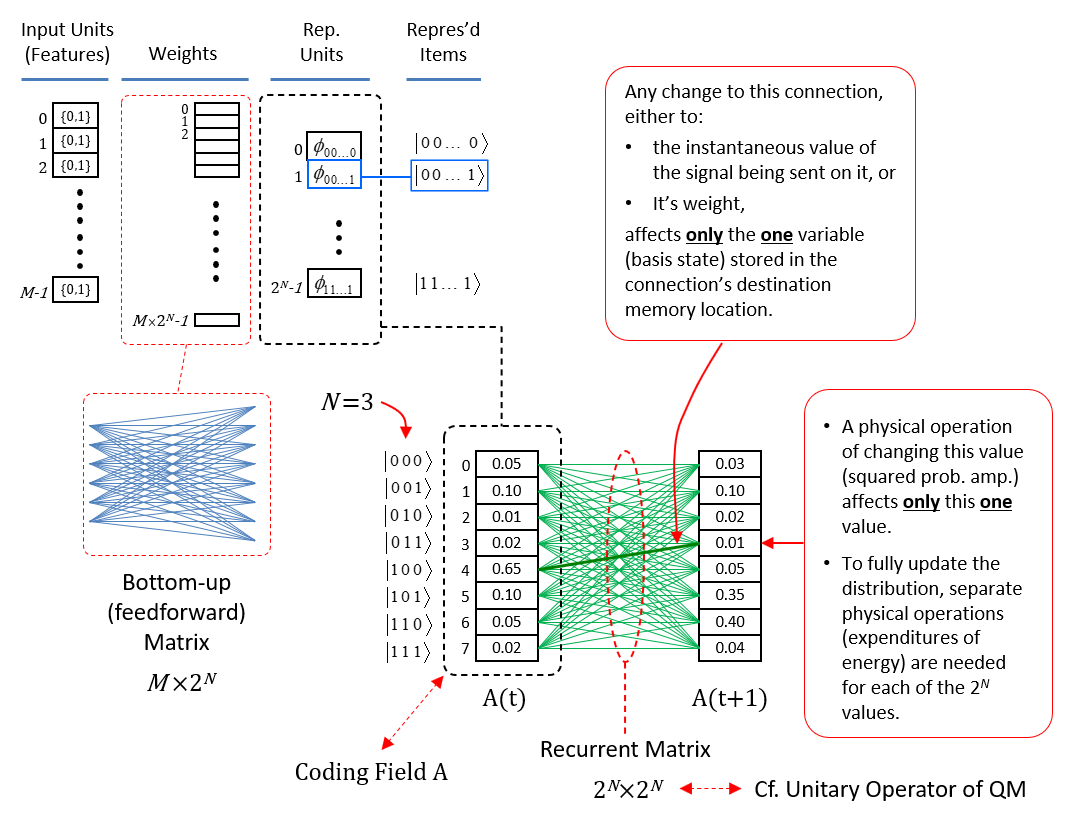
Figure 4 revisits Fig. 1 to further clarify why localist representations preclude quantum parallelism. The upper left portion recapitulates Fig. 1 (with a minor change of indexing of units from 1-based to 0-based) and adds an explicit depiction of the memory block for a bottom-up weight matrix (red dashed box) from the input field (for simplicity, the input units are assumed to be binary). We assume the matrix is complete and since the internal representational (i.e., coding) field (black dashed box) is localist, that matrix has M x 2N weights. The lower middle portion shows the coding field, now denoted A, again, and where, for concreteness, we assume there are N=3 input units. Thus, there are 23=8 possible input (basis) states and each has its own memory location. We show a particular probability distribution over those states at time t: the values sum to 1, and |100⟩ is most likely. We then introduce another matrix (green), a recurrent matrix that completely connects A to itself. The idea is that signals originating at time t recur back to A at t+1 whereupon some processing occurs in the coding field (in particular, including all 23 units computing their input summations), resulting in an updated probability distribution over the states at t+1. This recurrent matrix is 2N x 2N, and corresponds to a unitary operator of QM, and this will be discussed further in relation to Fig. 5. The red boxes identify the two essential weaknesses of localist representations with respect to quantum parallelism. First, as pointed out in the lower red box, and as stated at the outset, applying a physical operation on any one memory location, changes the value of only the one basis state represented by that location. Consequently, updating all 2N basis states requires 2N physical operations. Second, as pointed out in the upper red box, applying a physical operation to change the signal value on any one (bolded green line) of the 2N x 2N recurrent connections (or to change the weight of the connection) affects only the one basis state at the terminus of that connection. Clearly, it is the localist representation per se, that precludes the possibility of quantum parallelism.
Figure 4: Explanation of why Localist Representations Preclude Quantum Parallelism
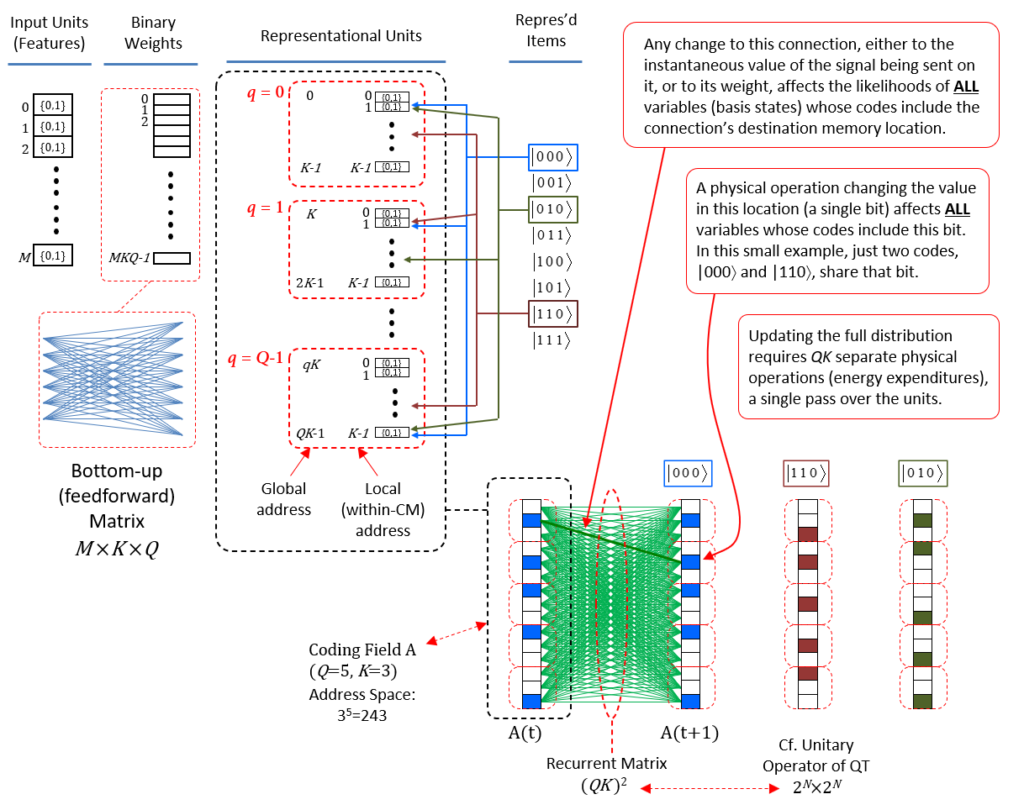
Figure 5 now shows the physical realization of quantum parallelism when items are represented as SDRs. As the “Representational Units” column shows, in the SDR case, the coding field is now organized as Q blocks of memory [the competitive modules (CMs) described above], each with K memory locations (which, in this case, can literally be just single bits), for a total of QK locations. Again, assuming N=3 input units, the next column shows the 23 represented items, i.e., basis states, and the colored lines between the columns show (notionally) the SDRs of three of the represented states. The blue arrows show that the code of |000⟩, φ(|000⟩), consists of the second unit in CM q=0, the second unit in CM q=1, …, and the last unit in CM, q=Q-1. The red arrows show the code for |110⟩, φ(|110⟩), which intersects with φ(|000⟩) in CM q=1, and so forth. The bottom right portion of the Fig. 5 shows the coding field again, where for concreteness, Q=5 and K=3, and shows the completely connected recurrent matrix (green). Note in particular, that the number of weights, (QK)2, in the recurrent matrix no longer depends on the number of represented (stored) basis states as for the localist case in Fig. 4. To the right, we see three possible states of the coding field, i.e., concrete codes for the three (out of 23) basis states above.
Figure 5: Explanation of how SDR Realizes Quantum Parallelism
The red boxes of Fig. 5 explain how quantum parallelism is realized in the case of SDR. The middle red box explains that when a physical operation is applied to any one unit of the coding field, in particular, the second unit of CM 1 (red arrow), ALL represented basis states whose SDRs include that unit are necessarily changed. For example, if the operation turns this unit off, then not only is the state, |000⟩, less strongly present, but so is the state, |110⟩: a single expenditure of energy at a particular point in space, a single bit, physically updates the states of multiple represented entities, i.e., quantum parallelism. This example clearly shows that using SDR implies quantum parallelism. The lower red box then explains that making a single pass over the QK memory locations, thus, QK physical operations, necessarily updates the full distribution over all stored codes. The crucial question is then: how many SDRs can be stored in such a field, or more specifically, how does the number of codes (i.e., of represented basis states of some observed/modeled system) that can be safely stored grow as a function of QK? As described below (Fig. 9), the results from my 1996 PhD thesis show that that number grows super-linearly in QK.
Finally, the upper red box of Fig. 5 explains that applying a single physical operation to any one connection (weight) necessarily affects ALL SDRs that include the unit at the terminus of that connection: again, this is quantum parallelism, but operating at the finer scale of the weights as opposed to the units. For example, if the weight of the bold green connection is increased (assume real-valued wts for the moment), then the input summation to its terminus unit (second unit in CM 1) will be higher. Since the CM functions as a WTA module, where the winner is chosen as a draw from a distribution (a transformed version of the input summation distribution), that unit will then have a greater chance of winning in CM 1. Thus, every SDR that includes that unit will have a greater likelihood of being activated as a whole, all from a single physical operation applied to a single memory location (representing a single weight). [The algorithm is summarized below.]
The Recurrent Matrix Embeds State Transitions that are Analogs of Unitary Operators of QM
I said above that the recurrent matrix corresponds to a unitary operator of QM. More precisely, the recurrent matrix is a substrate in which (in general, many) operators are stored, i.e., learned, during the unsupervised learning process. However, note that in QM, an operator is the embodiment of physical law (i.e., time-dependent Schrodinger equation) and is NOT viewed as being learned. Moreover, the approach of mainstream quantum computing has largely been to DESIGN operators, i.e., quantum gates and circuits composed of such gates, which perform generic logical operations; again, no learning.
Therefore, in yet another major departure from quantum mechanics and from mainstream quantum computing, in the machine learning (specifically, Sparsey’s unsupervised learning) scenario described here, the operators ARE learned from the data.
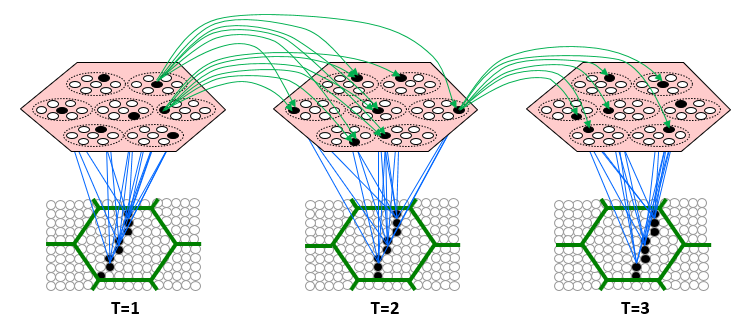
To flesh this out, let’s consider the case where the inputs are spatiotemporal patterns, e.g., sequences of visual frames as in Fig. 6. The figure shows a Sparsey coding field (rose hexagon), comprised of Q=7 WTA CMs, each composed of K=7 binary units, experiencing three successive frames of video of a translating edge in its input field, i.e., its “receptive field” (green hexagon). The coding field chooses an SDR (black units) for each input on-the-fly as it occurs and increases, from 0 to 1, all recurrent weights from units active at T to units active at T+1 (green arrows, and only a tiny representative sample shown, and in general, some may already have been increased by prior experiences).. Thus, input sequences are mapped to chains of SDRs (further elaborated on here, here, here, and most thoroughly, in my 2014 paper).
Figure 6: Memories of Sequences as Chains of SDRs
Fig. 6 depicts Sparsey’s primary concept of operations, i.e., to automatically form such SDR chains (memory traces) in response to the input sequences it experiences. But consider just a single association formed between one input frame and the next, e.g., between T=1 and T=2 of Fig. 6. This association, which is just a set of increased binary weights, can be viewed as an operator. It’s an operator that is formed, with full strength based on the single occurrence of two particular, successive states of the underlying physical world. From the vantage point of traditional statistics, this is just one sample and in general, we would not want to embed a memory trace of this at full strength: after all, it could be noise, e.g., it could reflect accidental alignments of one of more underlying objects and thus not reflect actual (or in any case, important) causal processes in the world. Nevertheless, Sparsey is designed to do just that, i.e., to embed this state transition as a full strength memory trace based on its single occurrence. It’s true that such an operator (state transition) is therefore highly idiosyncratic to the system’s specific experiences. However, because:
all such state-to-state transitions, which again are physically reified as sets of changed synaptic weights, are superposed (just as the SDRs themselves are superposed), and
Sparsey’s algorithm for choosing SDRs, the Code Selection Algorithm (CSA), preserves similarity (see below)
subsets of synapses that are common to multiple individual state-to-state transitions come to represent more generic causal and spatiotemporal similarity relations present in the underlying (observed) world. Hence, Sparsey’s dynamics realizes the continual superposing of operators of varying specificities directly on top of each other. Many/most of the more specific ones (akin to episodic memories) will fade with time, leaving the more generic ones (akin to semantic memories) in their wake.
Finally, what about the unitarity requirement of QM’s operators? That is, QM allows only unitary operators, i.e., operators that preserve a norm. This is required because the fundamental entity of QM is the probability distribution that exists over the basis states of the relevant physical system. Thus, in QM, all physical actions MUST result in a next state of the physical world that is also characterized by a probability distribution, i.e., must preserve the L2 norm to be of length 1. However, as noted above, e.g., with respect to Fig. 3, the instantaneous state of a Sparsey coding field, which is always a set of Q active binary units, represents a likelihood distribution over the stored codes. The likelihoods are fractions between 0 and 1, but do not sum to 1. Indeed, the total sum of likelihoods will in general change from one time step to the next. Of course, the vector of likelihoods over the stored codes can in principle, always be normalized (by dividing them all by the sum of all the likelihoods) to produce a true probability distribution. However, Sparsey’s update dynamics (see next section) effectively achieves this renormalization without requiring that explicit computation.
Summary of Sparsey’s Code Selection Algorithm (CSA)
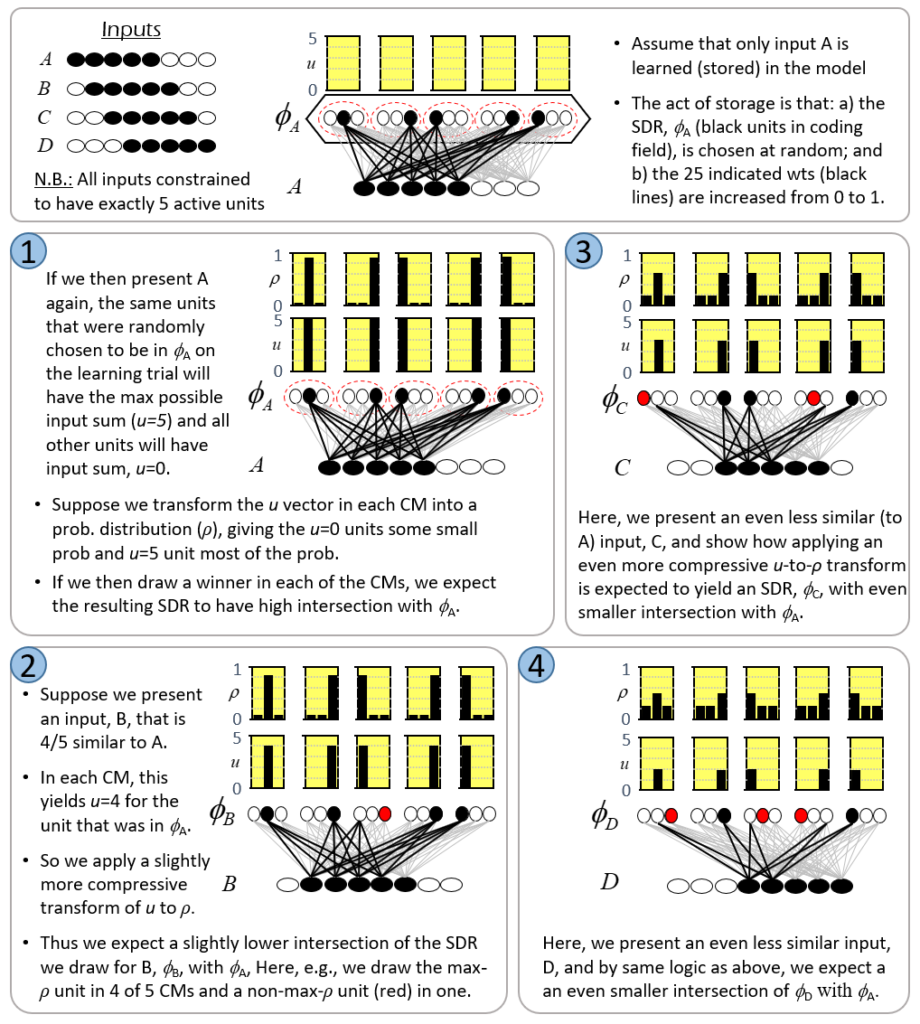
The key innovation of Sparsey is a simple, general, single-trial (one-shot), and most importantly, “fixed-time” unsupervised learning (storage) algorithm, the Code Selection Algorithm (CSA), which preserves similarity from the input space to the code (SDR) space, i.e., maps more similar inputs to more similar, i.e., more highly intersecting, SDRs. Fig. 7 illustrates this algorithm. The example involves a tiny instance of a Sparsey coding field comprised of Q=5 WTA CMs, each with K=3 units, and which receives a complete binary matrix (all wts initially 0, light gray) from an input field having 8 binary units. The top panel (at left) shows the four inputs, A to D, that will be considered. Note that we constrain all inputs to be of the same size, i.e., 5 active units, and that inputs B to D are progressively less similar to A. In the top panel (center), we show the act of learning input A: A is presented, an SDR, φ(A), is chosen by randomly picking a winner in each CM, and all weights from active input units to active coding units are increased from 0 to 1 (a simple Hebbian learning rule). A is the only input that will be learned in this example: the remaining four panels (1-4) illustrate the cases of presenting A, B, C, or D, as a test input, after having learned only A.
While the text in the Fig. 7 fully explains the dynamics, I’ll walk through it in the text here too. In Panel 1, we present A again. Due to the learning that occurred in the learning trial, the bottom-up (u) input sum will be u=5 for the five units that were randomly chosen to be in φ(A) and u=0 for all other units (shown in the yellow bar charts above the CMs). Clearly, if this model is being used as an associative memory, we would want the code originally assigned to this input, φ(A), to be activated exactly again. That would constitute the model recognizing the input. In this particular case, the model could achieve this by simply activating the unit with the hard max input sum (u) in each CM. However, for reasons that will be made clear in the remaining panels, Sparsey works differently. Rather, what Sparsey does is transform the u vector in each CM into a probability (ρ) distribution and then draw the winner from that distribution (i.e., a soft max in each CM). Here for example, the transform applied in each CM gives a little probability to each of the u=0 units, but most to the u=5 unit. In other words, the u distribution is slightly compressed (flattened, whitened) to yield the ρ distribution. In this case, we expect the max-ρ unit to win in most of the CMs, but lose occasionally (an exact expectation could be computed as a Bernoulli distribution, but that detail is not important to illustrate the essential concept of the algorithm). For argument’s sake, in this case, we show the max-ρ unit actually being chosen in all Q CMs, i.e., perfect reactivation of φ(A).
Figure 7: Simplified Explanation of how Sparsey Preserves Similarity
In Panel 2, we present a novel input, B, which is very, i.e., 4/5, similar to A. In fact, the model cannot know whether B is a truly novel input, i.e., whether its featural difference from A has important consequences and thus, whether B should be stored as a unique input, or whether B is a just a noisy version of A, in which case, A’s code, φ(A), should just be reactivated exactly. This is a meta-question (addressed for example in my 1996 thesis), but for the sake of this example, let’s assume it’s a truly novel input. In this case, despite the fact that we want to assign a unique code, φ(B), to B, we nevertheless should want φ(B) to be similar to φ(A), which in the case of SDRs, means having a high intersection. Following the reasoning given for Panel 1, we can achieve this result, i.e., approximately preserve similarity, by simply applying a slightly more compressive transform of u to ρ distributions in each CM (i.e., assign slightly more probability of winning to the u=0 units than in Panel 1, but still, much more probability of winning to the u=5 unit), as shown in Panel 2. For argument’s sake, we show the max-ρ unit winning in 4 out of 5 CMs, and the non-max-ρ unit (red unit) winning in one CM. Thus, B is 80% similar to A, and φ(B) is 80% similar to φ(A). The fact that the input and code similarities are both 80% here is incidental. What’s important is just this general principle that if we simply make the degree of compression of the u-to-ρ transform be inversely related to input similarity(directly proportional to novelty), we will approximately preserve similarity. Panels 3 and 4 just illustrate the same reasoning applied to progressively less similar inputs as the figure’s text explains. Hopefully, it is now clear why winners must be chosen using soft max rather than hard max: if hard max was used to pick the winner in each CM in panels 2-4 of Fig. 7, then the same exact SDR would be assigned to all four inputs. If the goal is to ensure (approximately) SISC, then soft max must be used.
Fig. 7 illustrates the essential concept of Sparsey’s Code Selection Algorithm (CSA), which can be described simply as: adding noise into the process of selecting winners (in the CMs), the magnitude (power) of which varies directly with the novelty of the input. Or, we can describe this as increasing noise relative to signal, where the signal is the input (u) vector (which reflects prior learning), again, proportional to input’s novelty. As the power of the noise increases relative to that of the signal, the ρ distributions approach the uniform distribution, thus, the selected SDR becomes completely random. This implements the clearly desirable property that more novel inputs are mapped to SDRs with higher expected Hamming distance from all previously stored SDRs, which maximizes expected retrieval accuracy. In contrast, the more similar a new input, X, is to one of the stored inputs, Y, the less noise is added to the ρ distributions and the greater the probability of reactivating the SDR of Y, φ(A), and in any case, the higher the expected fraction of φ(A) that will be reactivated.
Fig. 7 showed how increasingly novel inputs are mapped to increasingly distant (in terms of Hamming distance) SDRs. But how is novelty computed? It turns out that there is an extremely simple way to compute novelty, or rather to compute its inverse, familiarity, which was also introduced in my 1996 thesis (and described in subsequent works, 2010, 2014, 2017). I denote the familiarity of an input as G, which is simply the average of the max u values over the Q CMs. In fact, G reflects not merely the similarity of a new input, X, to the singleclosest-matching stored input, but it computes a generalized familiarity of X to ALL the stored inputs. That is, it reflects the higher-order similarity structure over all stored inputs. A G-like measure of novelty/familiarity appeared in a recent Nature article (Dasgupta et al, 2017) as part of a model of fly olfactory processing [the authors were unaware of my related method from 20+ years earlier (personal communication)]. However, the Dasgupta model does not use G to ensure (approximate) similarity preservation as does Sparsey.
Fixed-time Update of Likelihood Distribution over All Stored Codes
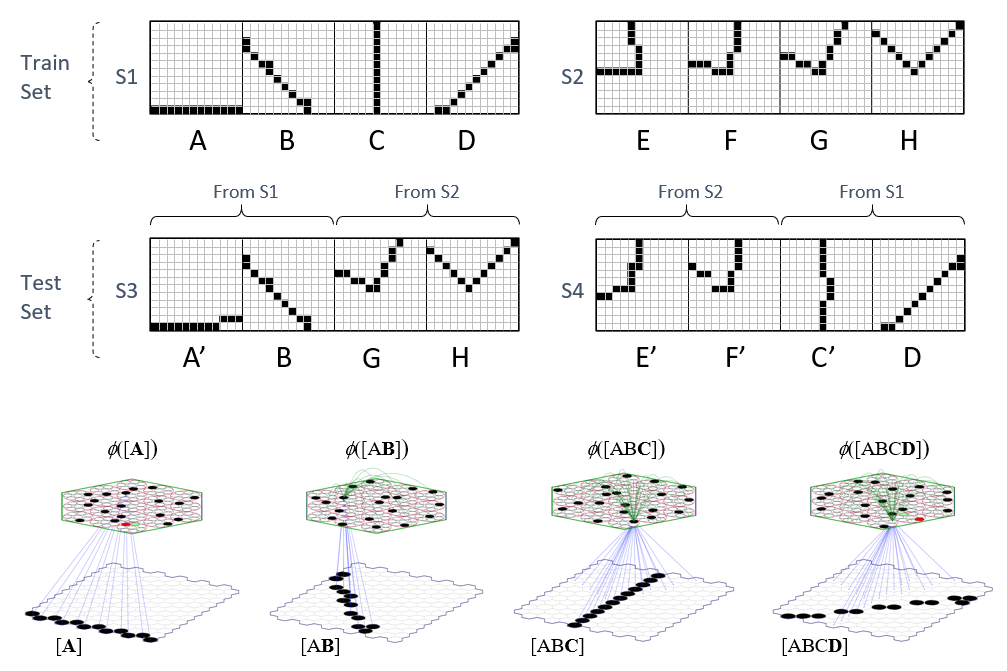
This section is currently just a stub. It will present results from my 2017 paper “A Radically New Theory of how the Brain Represents and Computes with Probabilities”, demonstrating fixed-time update of the likelihood distribution (and indirectly, the total probability distribution) over ALL items stored in a coding field. Moreover, these results concern learning and inference over spatiotemporal patterns, i.e., sequences, not simply spatial patterns as in the prior section. This entails a generalization of the CSA (compared to that described with respect to Fig. 7) in which the SDR chosen for the input at time t depends on both the bottom-up signals (the u values) and the signals arriving via the recurrent (a.k.a. “horizontal”) matrix (green arrows) from the code at time t-1. Note however, that the generalized CSA remains a fixed-time algorithm. The training set used in that paper consists of the two sequences, S1 and S2, shown in Fig. 8. The test sequence, S3, consisted of the first two items of S1 followed by the last two items of S2, the idea being that we “garden path” the model and see how well it can recover when it encounters the anomaly. Test sequence S4 was comprised of the first two items of S2 and the last two of S1. And, we also added some pixel-wise noise to some of the test sequence frames to make the inference problem harder. At bottom of Fig. 8, we show the model on the four items of training sequence S1, showing the bottom-up weights that were increased on each frame and a subset of the recurrent weights (green) that were increased. The full description of this result would make this already very long blog much longer and so will be done in a separate blog. For now. the reader can look at the 2017 paper to see the full description. As you will see, Sparsey, easily deals with these ambiguous moments of sequences, and rapidly recovers into the correct internal SDR chain as subsequent items of the sequence come in.
Figure 8: Learning Set of Two 4-Step Sequences
Further Remarks on Algorithmic Parallelism vs. Quantum Parallelism
As noted at the outset, with respect to an N-qubit quantum computer, quantum parallelism is usually described as the phenomenon in which the execution of a single physical, atomic operation simultaneously operates on all 2N basis states in the superposition. For example, applying a Hadamard transform on the N qubits results in a physical superposition in which all 2N basis states have equal probability amplitude, thus equal probability. More generally, in an instance of the Deutsch-Jozsa algorithm, a circuit of quantum gates is designedthat computes some function, f(). A single physical application (execution) of that circuit on the N-qubit system operates on all 2N basis states, φi, held in superposition, yielding a new superposition of the 2N values, f(φi). I make two key observations about this description of quantum parallelism.
I emphasized “designed” above to highlight the fact that most of the work in quantum computing has not focused on learning. Ideally, we want learning systems, and in particular, unsupervised learning systems, that realize/achieve quantum parallelism. That is, what we ideally want is a computer that can observe a physical dynamical system of interest through time—e.g., multivariate time series of financial/economic data, or biosequence/medical data, video (frame sequences) of activities/events transpiring in spaces, e.g., airports, etc.—and learnthe dynamics from scratch. By “learn the dynamics”, I mean learn the “basis states” of the system and learn the likelihoods of transitions between states, all at the same time.
In the above description of quantum parallelism, a single atomic physical operation is described as operating on, i.e., updating the probability amplitudes of, all 2N basis states held in the superposition in the N qubits. However, if these basis states in fact represent the states of a natural physical system, then while it is true that there are formally2N basis states, almost all of them will correspond to physical states that have near-zero probability of ever occurring. Moreover, almost all of the 2N x 2N state transitions will also have near-zero probability of occurring. That is, the strong hierarchical part-whole structure of natural entities and natural dynamics, e.g., operation of natural physical law, will, with probability close to 1, never bring the system into such states. These states likely do not need to be explicitly represented in order for the model to do a good job emulating the system’s evolution through time, and thus, allowing good predictions. Thus, if we take “almost all” seriously, then the number of basis states that, in practice, need to be represented (held) in superposition may be exponentially smaller than 2N, i.e., polynomial(and perhaps low-order polynomial) in N.
Sparsey addresses both these observations. Regarding the first, Sparsey was developed from inception as a biologically plausible, neuromorphic model of learning [as well as of memory (both episodic and semantic), inference, and cognition] of spatiotemporal patterns (handling purely spatial patterns as a special case). In that domain, the represented entities are sensory inputs, e.g., visual input patterns (preprocessed as seen here, here, or here), which are not known a priori, but have to be learned by experiencing the input domain, i.e., the “world”. In contrast, in quantum mechanics, the entities are the physical basis states themselves, which aredefined a priori, in terms of the values of (generally, one or a few) fundamental physical properties, e.g., spin angular momentum, polarization, of the system’s atomic constituents. Thus, quantum mechanics proper, has NOT been a theory about learning. Not surprisingly, quantum computing has largely also NOT been about learning. Most quantum computing algorithms in the literature, e.g., Shor’s, Grover’s, are fixed algorithms that perform specific computations.
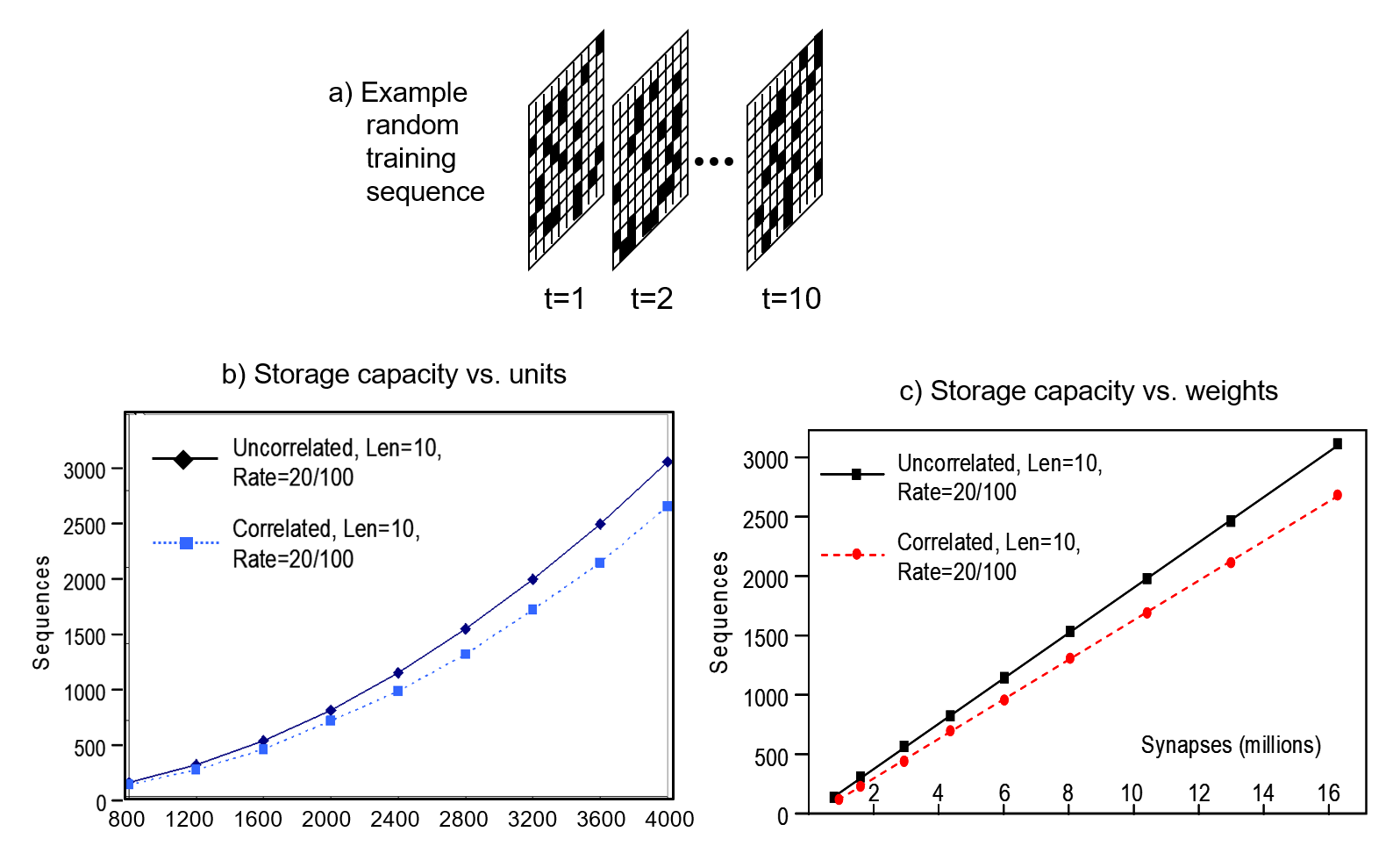
Regarding the second observation, a Sparsey coding field has a large storage capacity, not exponential in the units, but large. Specifically, simulation results show faster than linear (i.e., as some low-order polynomial) capacity scaling in the units, and linear scaling in the weights. N.b.: Those results from my 1996 Thesis research were done on a slightly different architecture. While they apply with full force to the current architecture (see Fig. 2), I don’t want to introduce the older architecture in the main flow of this essay and so direct the reader to this page to see the detailed results. Fig. 9 summarizes those results. In these experiments, the coding field consisted of Q=100 WTA CMs, and the number of units per CM, K, was varied from 8 to 40 in steps of 4. Here, the relevant matrix was the recurrent matrix that fully connected the coding field units to themselves. Thus, the matrix for the largest model tested, whose coding field had 100×40=4000 units, had 16 million weights. The learning protocol was temporal Hebbian, i.e., all weights from units active at T to units active at T+1 were set to 1 (either increased from 0 to 1, or left at 1). Thus, the SDRs of successive items of a sequence were “chained” together (as in Fig. 6). Also, in these experiments, the input level was a 10×10 binary pixel array and the objective was to store as many as possible 10-frame-long sequences, where each frame had 20 active pixels, as shown in Fig. 9a.
Figure 9: Storage Capacity of a Sparsey Coding Field.
Two input conditions were tested. In the first, labelled “uncorrelated”, all frames of all sequences were generated randomly. In the second, labelled “correlated”, we first created a lexicon of 100 frames, that were also generated randomly. The actual sequences of the correlated training set were then created by making 10 random draws (with replacement) from the lexicon. This “correlated” condition was intended to model the linguistic environment, i.e., where the items of sequences occur numerous times and in numerous sequential contexts. As Fig. 9b shows, the number of such sequences that can be safely stored, i.e., stored so that all sequences can be retrieved with accuracy above some threshold, here, ~97%, grows faster than linearly in the units. Note that here, retrieval was tested by reinstating the code of the first item of a sequence and measuring how precisely the remaining nine items were read out, i.e., these were recall, not recognition, tests. So this is a lot of information being stored and recalled. In the largest model tested (4000 units, 16 million wts), over 3,000 of these random 10-frame sequences were safely stored, despite being presented once each. Fig. 9c shows that the capacity scales linearly in the weights.
The classical realization of quantum entanglement
Quantum entanglement (QE) is the phenomenon in which two particles, X and Y, become perfectly correlated (or anti-correlated) with respect to some property, e.g., spin, even though neither particle’s value of that property is determined. In fact, the only definite physical change that can be said to occur at the moment of entanglement is that a dependence is introduced between X and Y such that if one is subsequently measured and found to have spin up, the other will instantly have spin down. X and Y are said to be in the “singlet” state: they are formally considered to be a single entity. At the moment of measurement, X and Y become unentangled, i.e., the singlet state, which is a superposition of the two basis states, collapses (decoheres) to one of the two possible basis states. This phenomenon occurs regardless of how far apart X and Y may be when either is measured, which implies superluminal propagation of effect (transfer of information), i.e., Einstein’s “spooky action at a distance”.
Is there another way of understanding the phenomenon of QE? Yes, I will provide a new, classical explanation of QE here, in terms of Sparsey’s SDR codes and the weight matrices that connect (including recurrently) coding fields. First, recall, in a side comment above, I proposed that a Sparsey coding field is the analog of a QM particle field, let’s say, the electron field. Thus, Sparsey’s binary units should be viewed as analogs of QM’s electrons. Fig. 10 illustrates the phenomenon of entanglement in Sparsey. Note however that this example uses a simpler code selection algorithm than Sparsey’s actual CSA, described above. Specifically, winners will now be chosen using hard max instead of soft max. Fig. 10a shows the learning event in which an input pattern, A (the five active binary units, “pixels”), has been presented. Note that all inputs will be constrained to have the same number of active pixels. The code (SDR), φ(A), is then chosen by picking the unit with the hard max input sum (u) in each CM. Since all weights are initially zero, all units have u=0, so the winners (black) are chosen randomly. Finally, the association from A to φ(A) is formed by increasing the depicted weights (black lines) from 0 to 1. The Q=7 units comprising φ(A) become entangled in this learning event. They become entangled because their individual afferent weight matrices are changed in exactly the same way: they all have their afferent weights from the same five active pixels increased from 0 to 1. Note also that at this point, these seven units are completely redundant (completely correlated).
To see why this learning event constitutes entanglement, consider the presentation of a second input, B, in Fig. 10b. B has 4 out of 5 pixels in common with A. Suppose we can observe (measure) any of φ(A)’s units, i.e., we have an “electrode” in it. Then, when the bottom-up signals arrive from the input level, as soon as we measure u for any one of those units, and find it to have u=4, we instantly know the other six units of φ(A) also have u=4. Just as in QM, where entanglement “propagates” across arbitrarily large distances of an actual quantum field, which spans all of space, this example shows that entanglement “propagates” across the full extent of of the coding field. But unlike the case for QM, we can directly see the physical mechanism underlying this “propagation”. In fact, it is clear that it is not propagation at all: no signal propagates across the coding field in this scenario. Again, it’s simply the correlated changes that occurred in the weight matrix that impinges the coding field during the learning, i.e., entanglement, event, which explains how we can instantly know the value of some variable (u) at arbitrarily remote distances from where a measurement takes place.
Figure 10: Entanglement in Sparsey
So, what is this telling us? It’s telling us that the weight matrix is analogous to a force-carrying (boson) field of QM. After all, it’s the boson fields through which effects (information) propagates through space and its the weight matrices of Sparsey (or of any neuromorphic model) through which effects/information propagate. I further emphasize that a boson field fills all of space (and is superposed with all other boson and fermion fields) and in particular, allows transmission of an effect from any point in space to any other (at ≤ speed of light). In other words, a boson field completely connects any particular fermion field. Likewise, we require that the matrix between any two Sparsey coding fields (including recurrently) and between a coding field and an input field also be complete. But of course there is at least one huge difference between a boson field and a weight matrix. The individual weights comprising a Sparsey weight matrix are changed by the signals that pass through them. In contrast, no such concept of learning, at least of permanent learning, applies to a boson field. I believe this is at the heart of why no one has have ever figured out a local “hidden variables” (HV) mechanism for QM. In all discussions I’ve seen, it seems that any such local HVs were posited to be located within the particles themselves. Recent experiments showing violation of Bell’s inequality refute those types of local HV explanations. But again, in Sparsey, as shown in Fig. 10, the physical changes underlying entanglement occur outside the entangled entities (the units) themselves; they occur in the weights. These weights still constitute local variables [after all, any individual weight is immediately local (adjacent) only to its source and destination units], but they are not hidden variables. I suspect that the recent Bell inequality violation findings do not refute the type of “local variables” explanation given here.
There is a great deal more to present regarding this new explanation of QE. I’ll do that in subsequent posts. For now, I just want to end this section by noting that this same principle/mechanism applies when thinking about how groups of neurons somehow become bound together to act as an integral code (single entity), i.e. how Hebbian “cell assemblies” form. Most prior computational neuroscience theories for cell assemblies, e.g., Buszaki’s “Synapsembles” (2010), propose that they form by virtue of changes made to weights directly between the member units of the cell assembly. But I have previously described how the “binding” mechanism described here–correlated changes to afferent and efferent weight matrices of the bound units–could easily explain the formation of cell assemblies in the brain’s cortex.
I’ve claimed for some time that quantum computing can be realized on a single processor Von Neumann machine and published a paper explaining the basic intuition. All that is necessary is to represent information using sparse distributed codes (SDC) rather than localist codes. With SDC, all informational states (hypotheses) represented in a system (e.g., computer) are represented in physical superposition and therefore all such states are partially active in proportion to their similarity with the current most likely (most active) state. My Sparsey® system operates directly on superpositions, transforming the superposition over hypotheses at T into the superposition at T+1 in time that does not depend on the number of hypotheses represented (stored) in the system. This update occurs via passage of signals via a recurrent channel, i.e., a recurrent weight matrix. In addition to a serial (in time) updating of the superposition, mediated by the recurrent matrix, the system may also have an output channel (a different, non-recurrent weight matrix) that “taps” off, i.e., observes, the superposition at each T. Thus the system can generate a sequence of collapsed outputs (observations) which can be thought of as a sequence of maximum likelihood estimates, as well as continuously update the superposition (without requiring collapse).
This has led me to the following interpretation of the quantum theory of the physical universe itself. Projecting a universe of objects in a low dimensional space, e.g., 3 dimensions, up into higher dimensional spaces, causes the average distance between objects to increase exponentially with the number of dimensions. (The same is true of sparse distributed codes living in a sparse distributed code space.) But now imagine that the objects in the low dimensional space are not point masses, but rather have extension. Specifically, let’s imagine that these objects are something like ball-and-stick lattices, or 3D graphs consisting of edges and nodes. The graph has extension in 3 dimensions, but is mostly just space. Further, imagine that the graph edges simply represent forces between the nodes (and not constrained to be pairwise forces), where the nodes are the actual material constituents of objects (similar to how an atom is mostly space…and perhaps even a proton is mostly empty space).
Now suppose that the actual universe is of huge dimension, e.g., a million dimensions, or an Avogadro’s number of dimensions, but let’s stick with one million for simplicity. Furthermore, imagine that these are all macroscopic dimensions (as opposed to the Planck-scale rolled up dimensions of string theory). Now imagine that this million-D universe is filled with macroscopic “graph” objects. They would have macroscopic extent on perhaps a large fraction or even all of those 1 million dimensions, but they would be almost infinitely sparse or diffuse, i.e., ghost-like, so diffuse that numerous, perhaps exponentially numerous such objects, could exist in physical superposition with each other, i.e., physically intermingled. They could easily pass through each other. But, as they did so, they would physically interact.
Suppose that we can consider two graphs to be similar in proportion to how many nodes they share in common. Thus two graphs that had a high fraction of their nodes in common might represent two similar states of the same object.
But suppose that instead of thinking of a single graph as representing a single object, we think of it as representing a collection of objects. In this case, two graphs having a certain set of nodes in common (intersection), could be considered to represent similar world states in which some of the same objects are present and perhaps where some of the those objects have similar internal states and some of the inter-object relations are similar. Suppose that such a graph, S, consisted of a very large number (e.g., millions) of nodes and that a tiny subset, for concreteness, say, 1000, of those nodes corresponded to the presence of some particular object x. Then imagine another instance of the overall graph, S’, in which 990 of those nodes are present. We could imagine that that might represent another state of reality in which x manifests almost identically as it did in the original instance; call that version of x, x‘. Thus, if S was present, and thus if x was present, we could say that x‘ is also physically present, just with 990/1000 strength rather than with full strength. In other words, the two states of reality can be said to be physically present, just with varying strength. Clearly, there are an exponential number of states around x that could also be said to be partially physically present.
Thus we can imagine that the actual physical reality that we experience at each instant is a physical superposition of an exponentially large number of possible states, where that superposition, or world state, corresponds to an extremely diffuse graph, consisting of a very large number of nodes, living in a universe of vastly high dimension.
This constitutes a fundamentally new interpretation of physical reality in which, in contrast to Hugh Everett’s “many worlds” theory, there is only one universe. In this single universe, objects do physically interact via all the physical forces we already know of. It’s just that the space itself has such high dimension and these object’s constituents are so diffuse that they can simply exist on top of each other, pass through each other, etc. Hence, we have found a way for actual physical superposition to be the physical realization of quantum superposition.
Imagine projecting this 1 million dimensional space down into 3 dimensions. These “object-graphs”, which are exponentially diffuse in the original space, will appear dense in the low dimensional manifold. Specifically, the density of such objects increases exponentially with decreasing number of dimensions. I submit that what we experience (perceive) as physical reality is simply an extremely low dimensional, e.g. 3 or 4 dimensions, projection of a hugely-high dimensional universe, whose objects are macroscopic but extremely diffuse. Note that these graphs (or arbitrary portions thereof) can have rigid structure (due to the forces amongst the nodes).
In particular, this new theory obviates the need for the exponentially large number of physically separate universes that Everett’s theory requires. Any human easily understands the massive increase in space in going from 1-D to 2-D or from 2-D to 3-D. There is nothing esoteric or spooky about it. Anyone can also understand how this generalizes to adding an arbitrary number of dimensions. In contrast, I submit that no human, including Everett, could offer a coherent explanation of what it means to have multiple, physically separate universes. We already have the concept, which we are all easily taught in childhood, that the “universe” is all there is. There is no Physical room for any additional universes. The “multiverse”—a hypothesized huge or infinite set of physical universes—is simply an abuse of language.
Copenhagen maintains that all possible physical states exist in superposition at once and that when we observe reality, that superposition collapses to one state. But Copenhagen never provided an intuitive physical explanation for this quantum superposition. What Copenhagen simply does not explain, and what Everett solves by positing an exponential number of physically separate, low-dimensional universes, filled with dense, low-D objects, I solve by positing a single super-high dimensional universe filled with super-diffuse, high-D objects.
Slightly as an aside, this new theory helps resolve a problem I’ve always had with Schrodinger’s cat. The two states, “cat alive” and “cat dead” are constructed to seem very different. This misleads people into thinking that at every instant and in every physical subsystem, a veritable infinity of states coexist in superposition. I mean…why stop at just “cat alive” and “cat dead”? What about the state in which a toaster has appeared, or a small nuclear-powered satellite? I suppose it is possible that some vortex of physical forces, perhaps designed by a supercomputer, could instantly rearrange all the atoms in the box from one in which there was a live cat to one in which there is the toaster, or the satellite. But I think it is better to think of transformations like this to have zero probability. My point here is that the number of physical states to which any physical subsystem might collapse at any given moment, i.e., the cardinality of the superposition that exists at that moment, is actually vastly smaller than one might naively think having been misled by the typical exposition of Schrodinger’s cat. Thus, it perhaps becomes more plausible that my theory can accommodate the number of physical states that actually do coexist in superposition.
Again, this theory of what physical reality actually is came to me by first understanding and constructing a similar theory of information representation and processing in the brain, i.e., a theory about representing items of information, not actual physical entities. In that SDC theory, the universe is a high-D “codespace”, the “objects” are “representations” or “codes”, and these codes are high-D but are extremely diffuse (sparse) in that codespace.